模擬人體生物肺是醫務人員掌握和練習新型肺部介入診療器械的重要途徑之一,在正壓通氣模式下其通氣效果研究對臨床通氣治療有著指導作用。為解決模擬人體生物肺在正壓通氣模式下參數配置復雜、氣壓和氣流波形呈現緩慢等缺點,本文以模擬人體生物肺為研究對象,建立電學仿真通氣模型。在壓力調節容積控制(PRVC)正壓通氣模式下,進行仿真通氣實驗,將仿真所獲取的通氣波形與正常成人的通氣波形進行比較分析。實驗結果表明,在PRVC正壓通氣模式下,主要參考指標潮氣量值的平均誤差為9.8%,能有效模擬正常成人的通氣效果。可見,所建立的電學仿真通氣模型具有可行性,為模擬人體生物肺正壓通氣實驗平臺的進一步研究提供了條件。
引用本文: 嚴欽城, 吳全玉, 張偉民, 潘玲佼, 劉曉杰, 陶為戈. 模擬人體生物肺正壓通氣系統設計與仿真研究. 生物醫學工程學雜志, 2024, 41(4): 775-781. doi: 10.7507/1001-5515.202401063 復制
版權信息: ?四川大學華西醫院華西期刊社《生物醫學工程學雜志》版權所有,未經授權不得轉載、改編
0 引言
肺部疾病是威脅人們身體健康和生命安全的嚴重疾病。肺部介入診療方案在肺部疾病的早期篩查和診斷中起到了重要作用,并且能夠顯著提高患者預后[1]。隨著患者對肺部疾病診療需求的增加,國內的肺部介入診療方案也有了蓬勃發展,出現了各種新型肺部介入診療器械,如電磁導航支氣管鏡、虛擬支氣管鏡導航等,并應用于臨床診療當中[2-5]。模擬人體生物肺是醫務人員掌握和練習新型肺部介入診療器械的重要方式之一,醫務人員通過它進行練習或教學[6],可以有效降低新型肺部介入診療器械的臨床應用風險,更好地服務于患者。
在臨床上,治療呼吸困難或無自主呼吸患者的通氣模式可分為兩種[7-8],分別為正壓通氣模式和負壓通氣模式。隨著醫學技術的發展,負壓通氣治療模式已經逐漸被淘汰,各種類型的正壓通氣模式成為了研究熱點。文獻[9-10]在建立的呼吸仿真模型基礎上,開展了正壓通氣下呼吸道內氣流和氣壓的研究。文獻[11-12]以通氣裝置和患者呼吸道為研究對象,建立了無創通氣治療系統模型,在此基礎上開展了對無創雙水平正壓通氣模式的研究。文獻[13]分別對三種新型正壓通氣模式下的人機同步性能進行了研究。文獻[14-15]基于電路學建立呼吸系統模型,研究了新型正壓通氣模式。鑒于正壓通氣模式的重要性,如果將之應用于模擬人體生物肺,可以幫助醫務人員更好地了解通氣效果,減少或避免臨床通氣所存在的風險,對肺部疾病通氣治療有著指導意義。然而,模擬人體生物肺在正壓通氣模式下的參數配置復雜[16-17],還具有氣壓和氣流波形呈現緩慢等缺點。針對這些問題,本文基于Matlab建立模擬人體生物肺電學仿真通氣模型,開展仿真正壓通氣實驗,為模擬人體生物肺的正壓通氣實驗平臺的實現提供了條件,同時也能快速改進實驗平臺的控制策略。
1 模擬人體生物肺
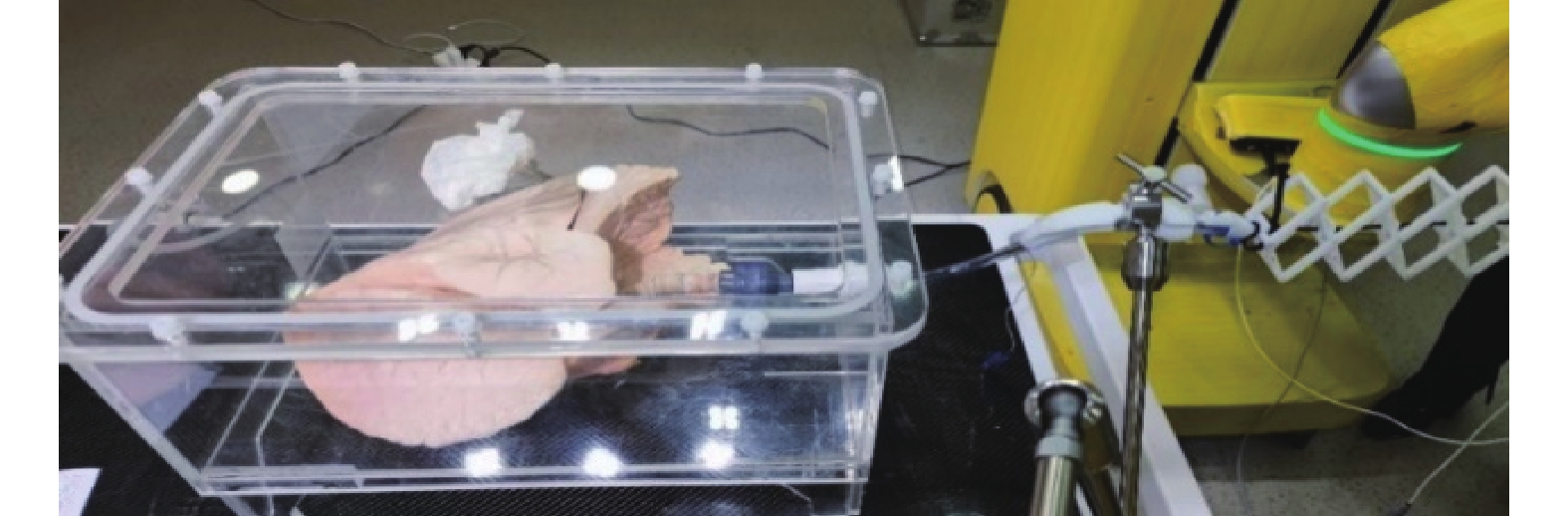
模擬人體生物肺主要應用于肺部介入診療器械的演示和教學中,如圖1所示,是由生物肺肺體、由令接頭和生物肺肺箱等部分組成。其中生物肺肺體是豬肺經過特殊灌洗方法制作而成,擁有主氣管、左右支氣管和肺內各級支氣管等結構。在研究正壓通氣時,模擬人體生物肺各級氣管內的氣流分別受到了黏性氣阻、慣性氣阻以及彈性氣阻的作用[18-20],借用電學符號,將它們分別等效為電路學中的電阻R、電感L和電容C。模擬人體生物肺各級氣阻參考值如表1所示。
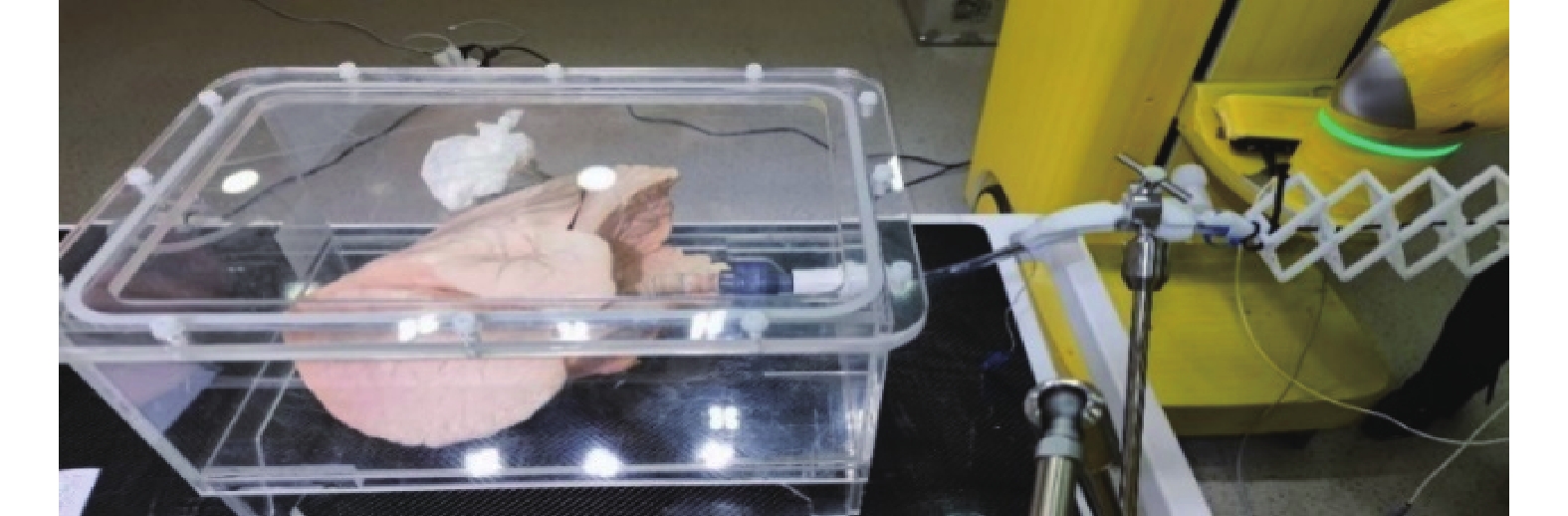 圖1
模擬人體生物肺
Figure1.
Simulation of the human biological lung
圖1
模擬人體生物肺
Figure1.
Simulation of the human biological lung
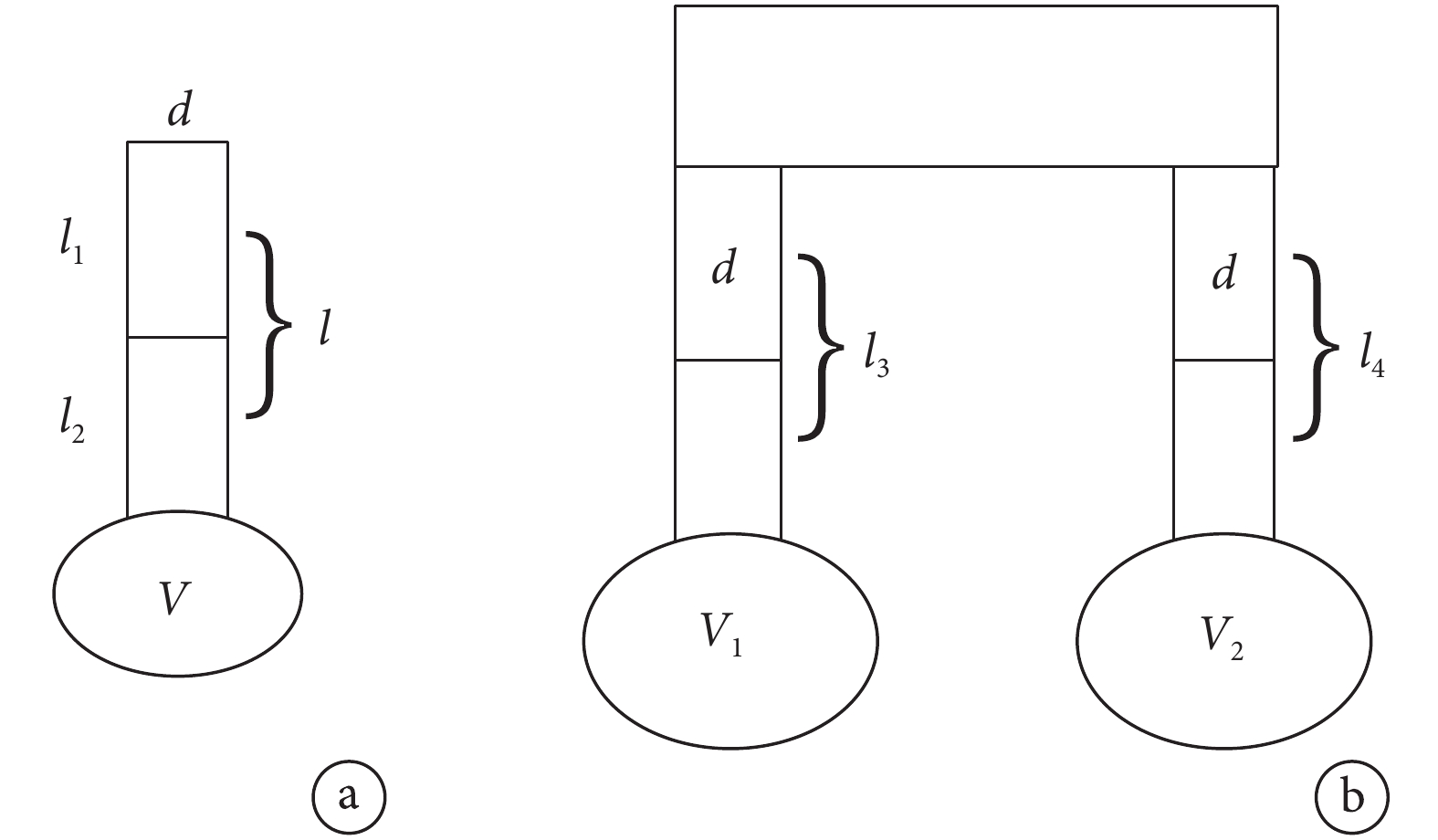
如圖2a所示,取直徑為d、長度為l的氣管,將氣管分為兩段,長度分別為l1和l2,它們之間的關系為l = l1 + l2,其中一端和容積為V的肺泡相連接。此結構類似于電學中的串聯結構[21-24],它們對應的黏性氣阻和慣性氣阻分別為R、R1、R2和L、L1、L2,具體的關系如式(1)所示。
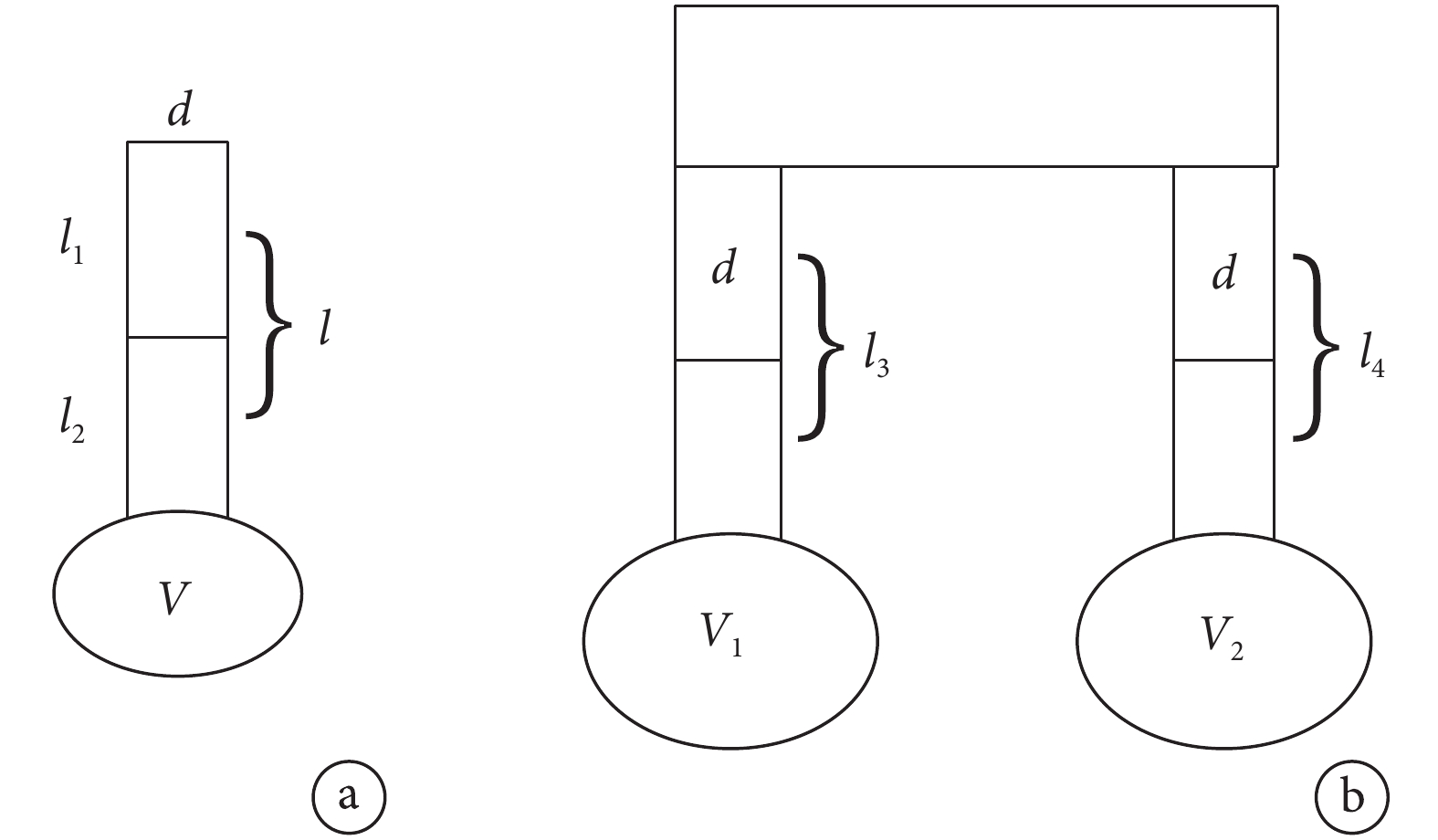 圖2
氣管結構
圖2
氣管結構
a. 串聯結構;b. 并聯結構
Figure2. Trachea structurea. series structure; b. parallel structure
 |
如圖2b所示,取兩段長度分別為l3和l4、直徑都為d的氣管,分別與容積V1和V2的肺泡相連接,它們對應的黏性氣阻和慣性氣阻分別表示為R、R1、R2和L、L1、L2。V1和V2的彈性氣阻分別表示為C1和C2。這種結構類似于電學中的并聯結構[21-24],具體的關系如式(2)所示。
 |
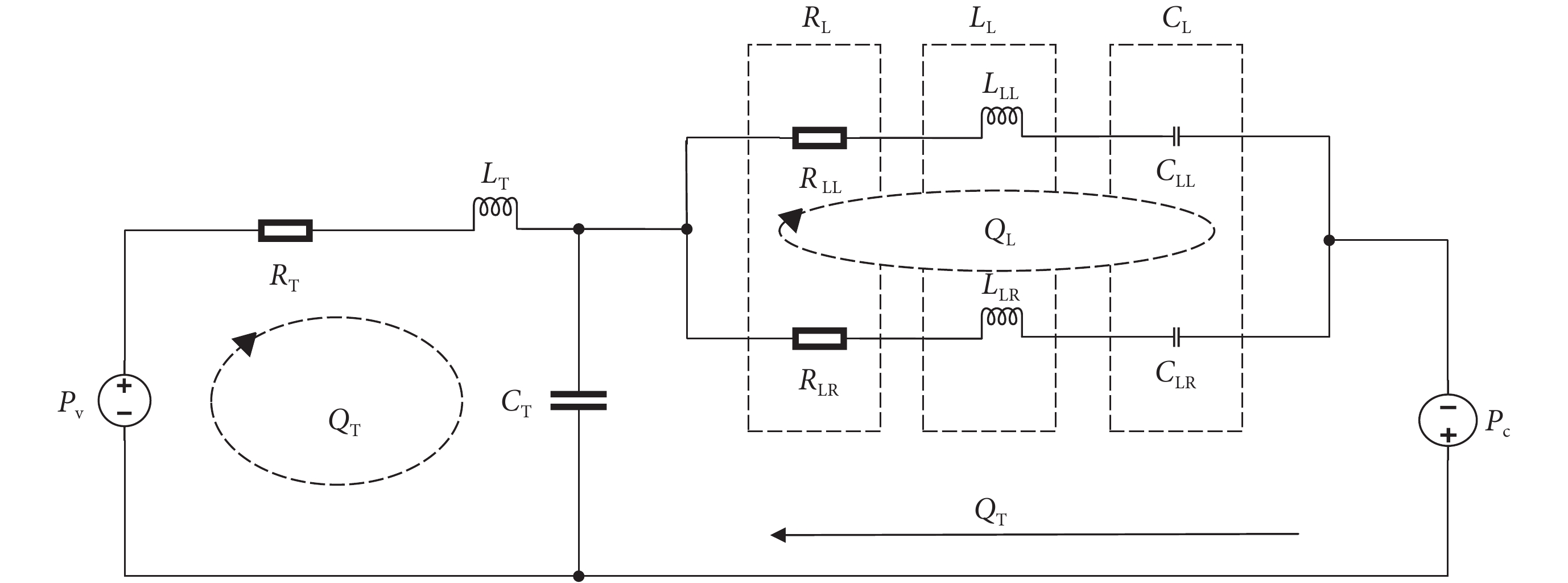
利用電路學中串聯和并聯關系,建立模擬人體生物肺的電學通氣模型。將生物肺左邊部分對應的黏性氣阻RLL、慣性氣阻LLL和彈性氣阻CLL和生物肺右邊部分對應的黏性氣阻RLR、慣性氣阻LLR和彈性氣阻CLR進行整合,分別用RL、LL和CL來表示左右肺泡的總黏性氣阻、慣性氣阻和彈性氣阻。主通氣管道對應的阻值分別表示為黏性氣阻RT、慣性氣阻LT和彈性氣阻CT,機械通氣提供的外部氣壓壓力表示為Pv,生物肺內部的實際氣壓壓力表示為Pc,流經主通氣管道和子支氣管的氣流流量分別用QT和QL表示。模擬人體生物肺電學仿真通氣模型,如圖3所示,圖中各物理量滿足的關系如式(3)所示。
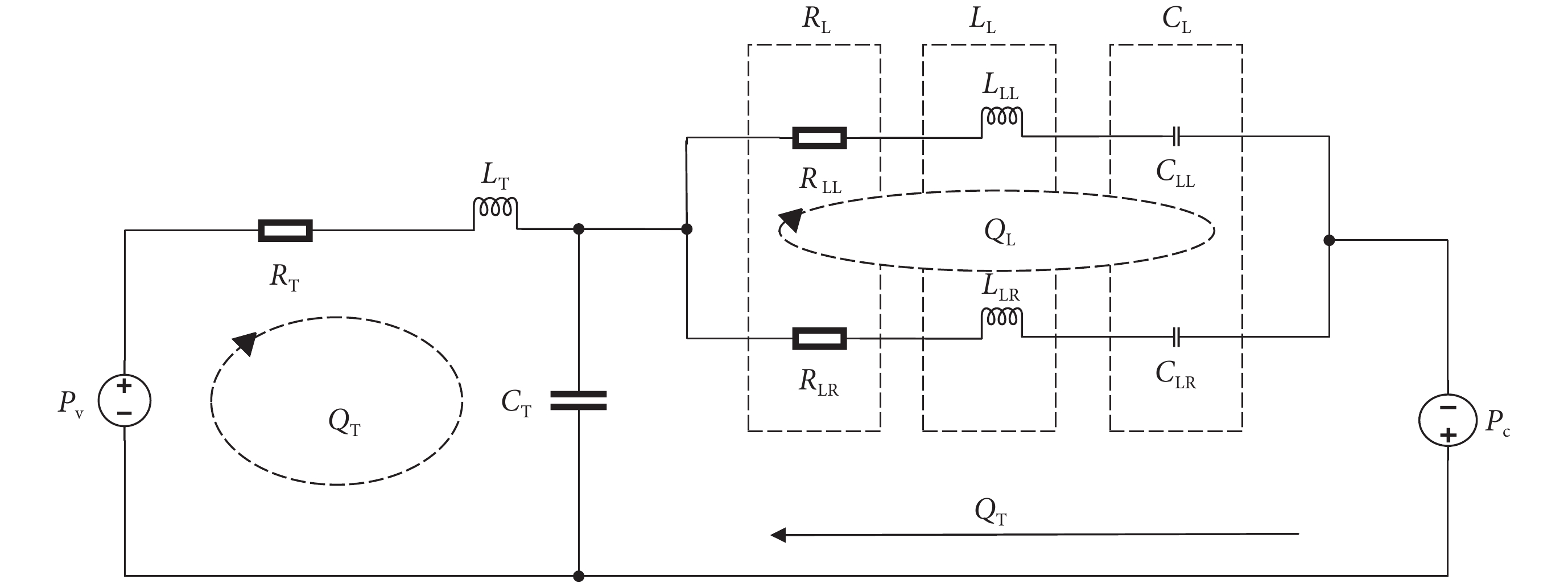 圖3
模擬人體生物肺電學仿真通氣模型
Figure3.
Electrical simulation ventilation model for simulated human biological lung
圖3
模擬人體生物肺電學仿真通氣模型
Figure3.
Electrical simulation ventilation model for simulated human biological lung
 |
2 模擬人體生物肺PRVC通氣模型
壓力調節容積控制模式(pressure regulated volume control,PRVC),是一種結合壓力控制和容量控制的先進正壓通氣模式[14]。在臨床治療中,在壓力控制正壓通氣模式下,通氣量會隨著通氣管道和肺部的順應性變化而變化,有可能出現通氣量不足的情況。容量控制正壓通氣模式,在保證有通氣量情況下,很可能會出現氣道壓力過大的情況,給患者造成氣壓傷。PRVC正壓通氣模式克服了這兩種正壓通氣模式的不足,在保證潮氣量的基礎上可自動調節氣道壓力水平,調節的過程如圖4所示。
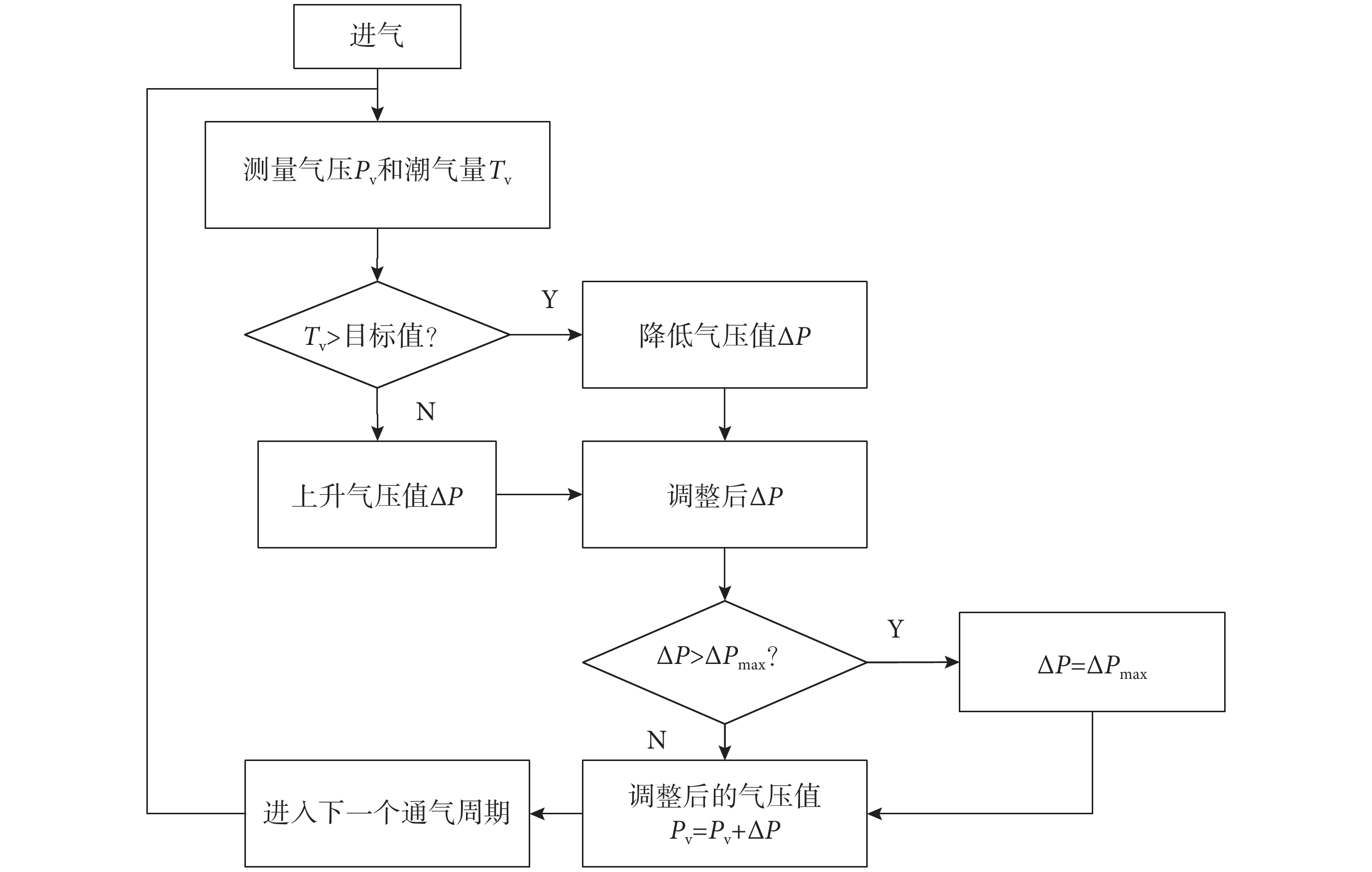 圖4
PRVC模式調節過程
Figure4.
Regulation process of PRVC mode
圖4
PRVC模式調節過程
Figure4.
Regulation process of PRVC mode
在圖4中,ΔPmax的值設定為壓力最大值與實際氣壓值的差值。ΔP的調整值與增益值K[25-26]、實際的潮氣量和設定的潮氣量值相關,具體定義如式(4)所示。其中,增益值K如果選得過高,容易引起潮氣量值的震蕩;如果選得過低,則會造成氣壓調整響應速度減慢。研究發現當K=6時,氣壓壓力值有顯著的變化,并且可避免潮氣量值產生震蕩。
 |
根據PRVC正壓通氣模式自動調節氣道壓力值的特點,建立以氣道壓力值為反饋的控制系統,系統框圖如圖5所示。圖中C(s)為機械通氣控制函數,Pv(s)為機械通氣輸出的氣壓函數,G1(s)為PRVC模式控制函數,G2(s)為PRVC模式傳輸函數,H(s)為一階濾波器,Pc(s)是模擬人體生物肺內部的實際壓力函數。其中C(s)、G1(s)、G2(s)和H(s)的定義如式(5)所示。
 圖5
模擬人體生物肺PRVC正壓通氣控制系統
Figure5.
PRVC positive pressure ventilation control system for simulated human biological lung
圖5
模擬人體生物肺PRVC正壓通氣控制系統
Figure5.
PRVC positive pressure ventilation control system for simulated human biological lung
 |
結合表1模擬人體生物肺氣阻數據、式(3)和式(5),在PRVC正壓通氣模式下,系統的開環傳遞函數計算如式(6)所示。
 |
通過計算,可以得到系統的零點分別是z1 = –3 445.53,z2 = –858.21,極點分別是p1 = –2.256,p2 = –885.41,p3 = –
 |
3 仿真實驗與結果
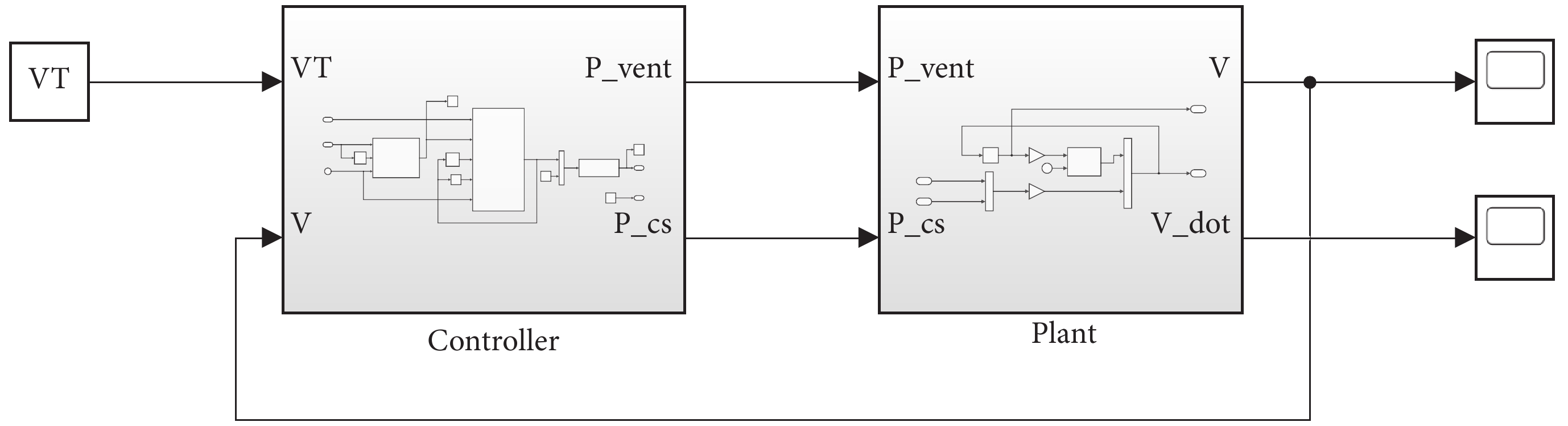
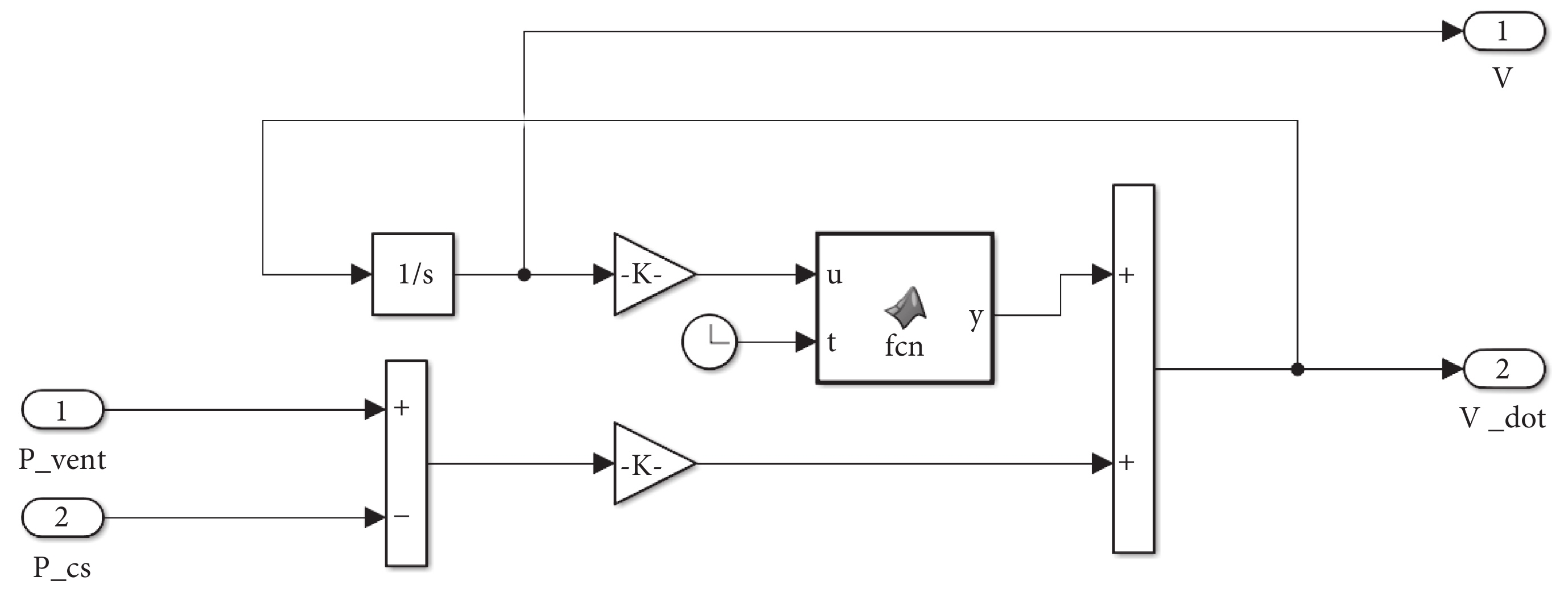
搭建的模擬人體生物肺正壓通氣系統仿真模型如圖6所示。仿真模型主要包括兩大模塊,分別為控制模塊和傳輸模塊。其中控制模塊如圖7所示,傳輸模塊如圖8所示。
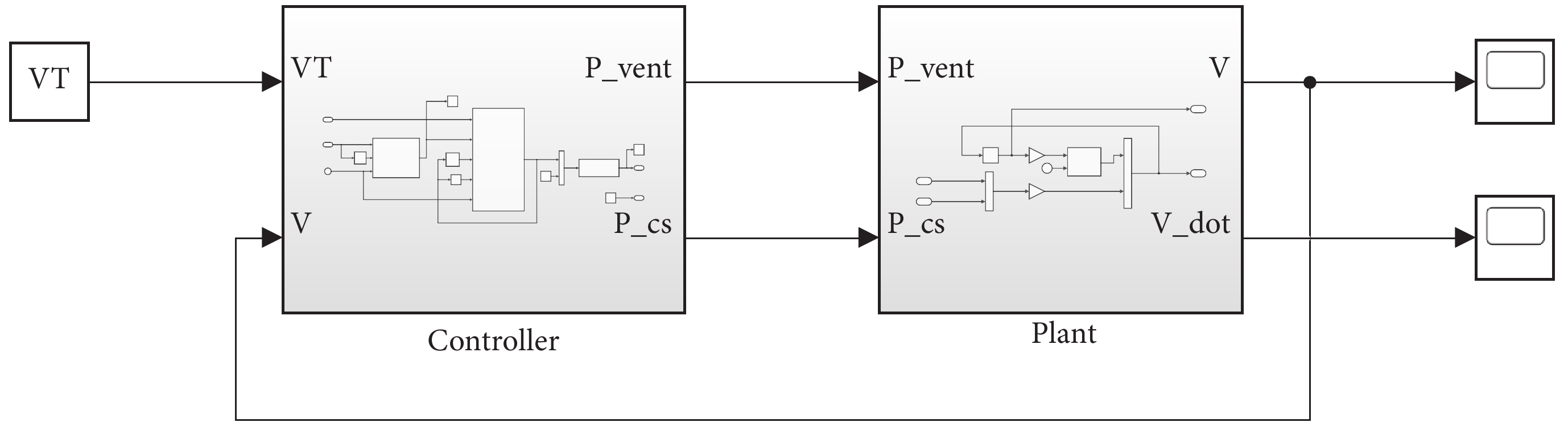 圖6
模擬人體生物肺正壓通氣系統仿真模型
Figure6.
Simulation model of simulated human biological lung positive pressure ventilation system
圖6
模擬人體生物肺正壓通氣系統仿真模型
Figure6.
Simulation model of simulated human biological lung positive pressure ventilation system
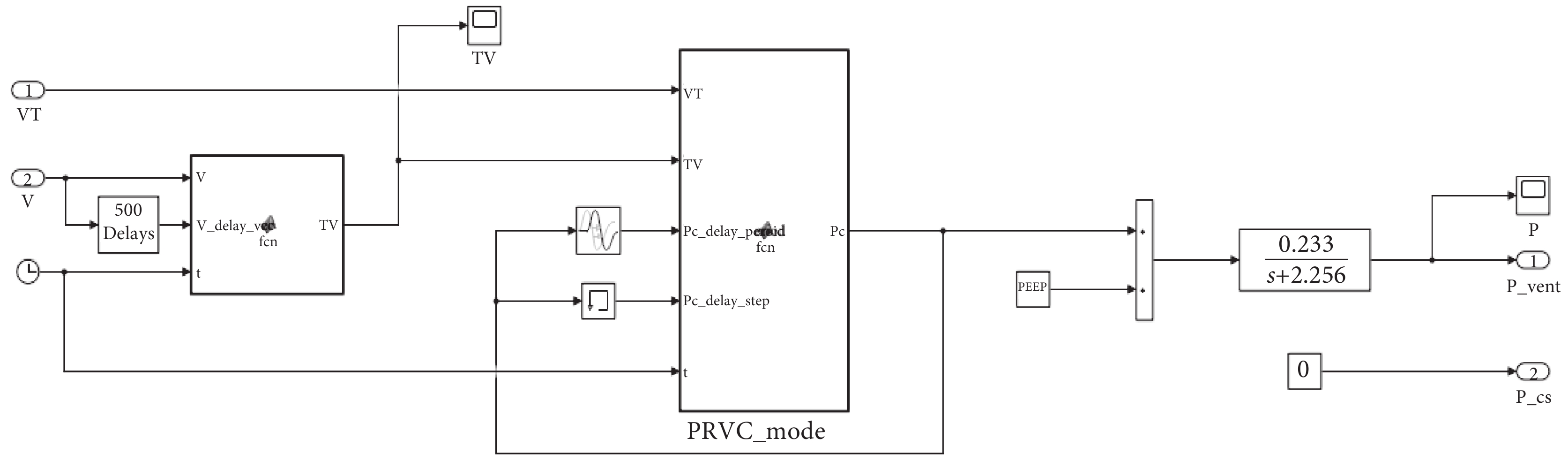 圖7
模擬人體生物肺正壓通氣系統控制模塊
Figure7.
Control module of simulated human biological lung positive pressure ventilation system
圖7
模擬人體生物肺正壓通氣系統控制模塊
Figure7.
Control module of simulated human biological lung positive pressure ventilation system
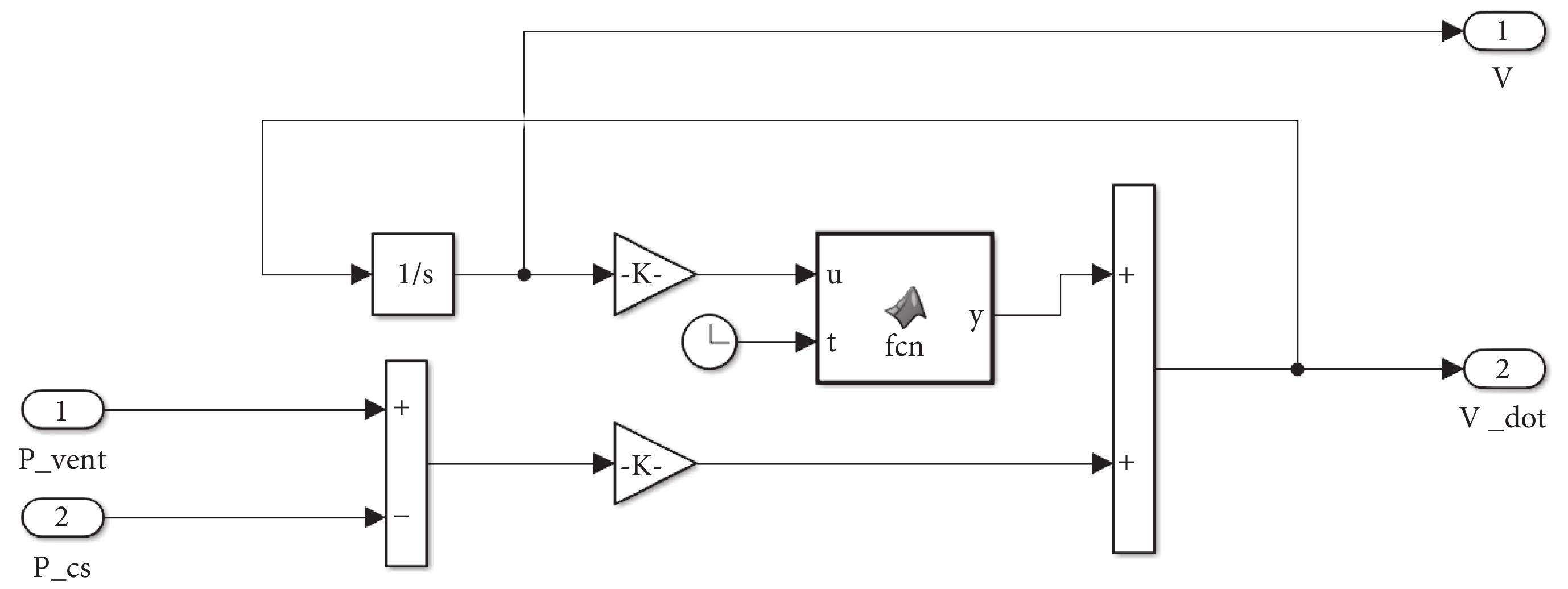 圖8
模擬人體生物肺正壓通氣系統傳輸模塊
Figure8.
Transmission module of simulated human biological lung positive pressure ventilation system
圖8
模擬人體生物肺正壓通氣系統傳輸模塊
Figure8.
Transmission module of simulated human biological lung positive pressure ventilation system
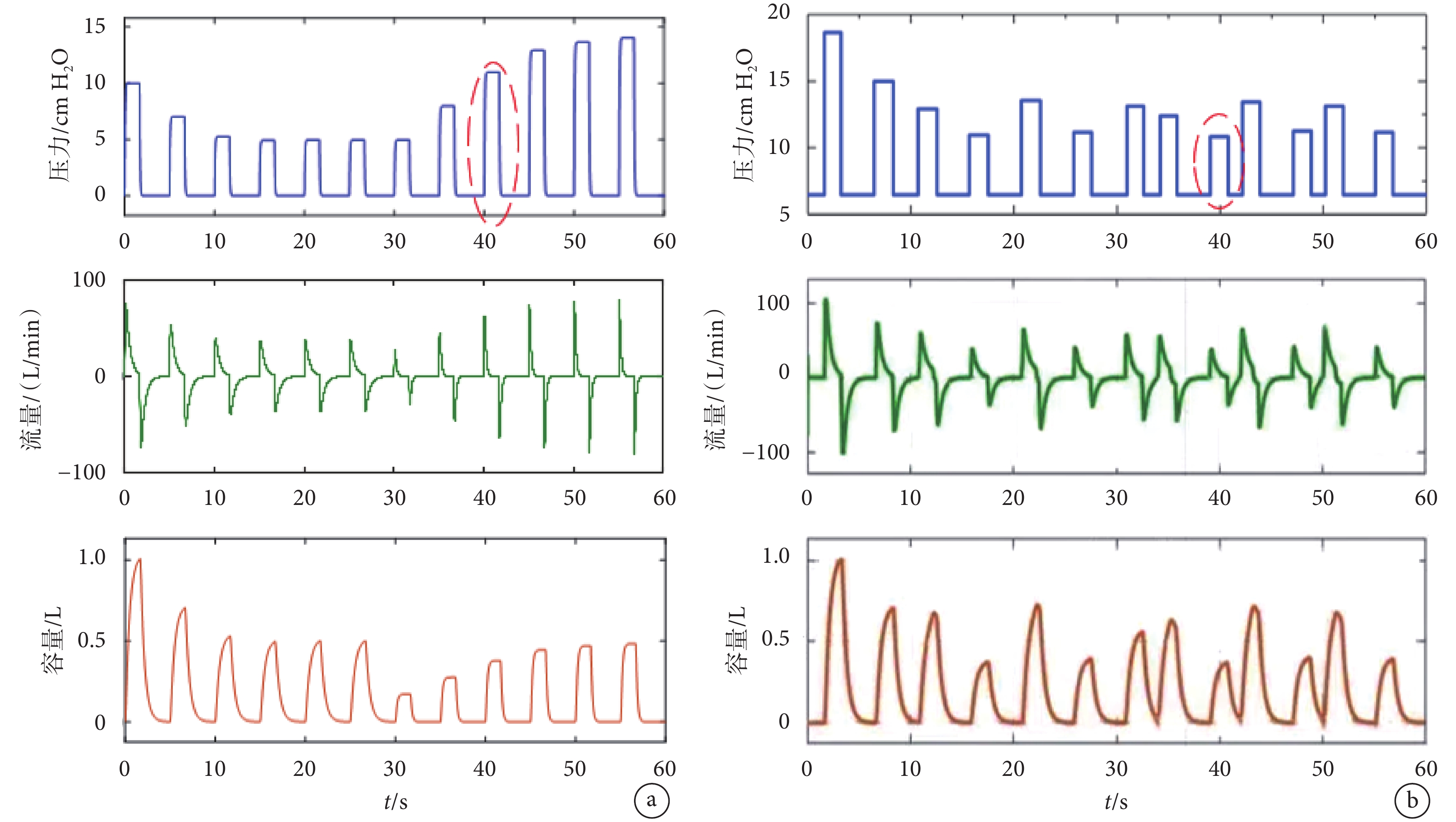
上述圖中VT表示設定潮氣量值,TV表示實際潮氣量值,P_vent表示機械通氣提供的外部壓力,P_CS表示生物肺內部的實際壓力,V表示經過調整后的潮氣量值,V_dot表示經過調整后的氣流量值。由于模擬人體生物肺沒有呼氣末正壓,PEEP參數設置為0。在仿真實驗中,設定了壓力最大值Pmax和初始目標潮氣量值,分別為30 cm H2O和500 mL,呼吸頻率為12次/min,一階濾波器的時間常數τf 設定為50 ms,PEEP 為0 cm H2O,增益值K為6。具體仿真實驗結果如圖9所示。
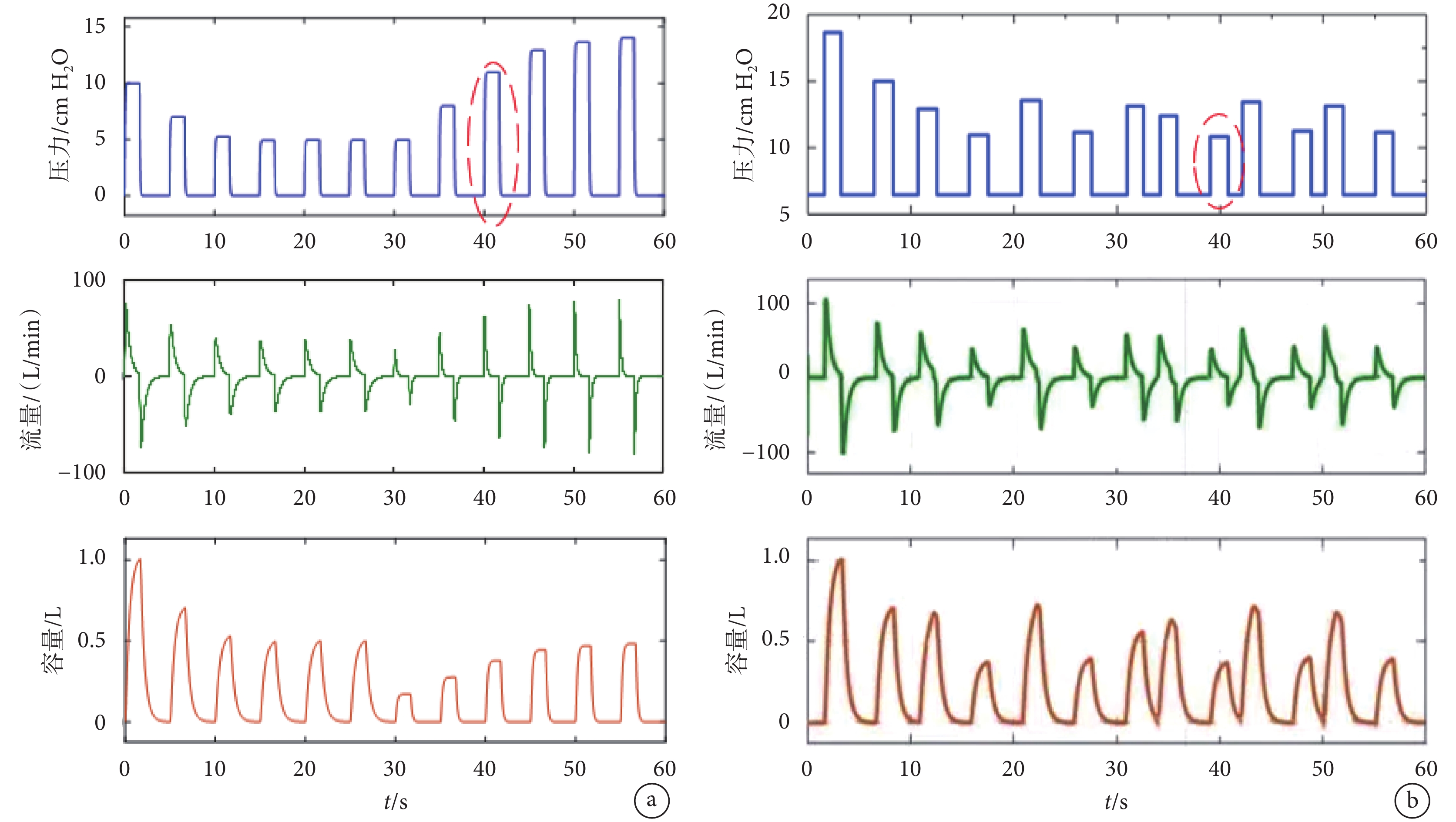 圖9
PRVC模式仿真實驗結果
圖9
PRVC模式仿真實驗結果
a. 模擬人體生物肺仿真通氣數據曲線;b. 正常成人通氣數據曲線
Figure9. Simulation results of PRVC modela. simulation ventilation data wave of simulated human biological lung; b. ventilation data wave of normal adult
結合圖9讀取Δt時間段內模擬人體生物肺和正常成人在時刻點t = 10、20、30、40、50 s 的通氣數據,具體如表2所示。
4 討論
本文在Matlab上成功進行了模擬人體生物肺仿真正壓通氣實驗,由于模擬人體生物肺內部不具備殘氣量,在正壓通氣模式開始前肺體呈塌陷狀態,氣體進入生物肺肺泡的傳輸距離更近,從圖9a 中可以看出,在通氣開始階段所需初始目標氣道壓力值小于正常成人,達到初始氣道目標壓力值后開始逐一改變氣道壓力,以達到目標的潮氣量值。在t = 30 s時,通過調整通氣氣壓值,成功獲得了期望的潮氣量值。仿真所得到的通氣數據如表2所示。在Δt時間段內,潮氣量的平均誤差率為9.8%,氣流量的平均誤差率為17.6%,氣壓量平均誤差率為21.8%。針對仿真結果誤差進行分析,所建立的仿真通氣模型不同于正常成人的肺部結構,模擬人體生物肺沒有鼻、咽喉等器官組織的影響,氣流以更快的速度到達肺泡。通過圖9a可以看出,在前30 s初始通氣階段,所需的氣壓和潮氣量低于正常成人;在t = 40 s時,如圖9a與圖9b紅圈標注對比所示,正常成人存在自主呼吸用力,使得所需的氣壓和氣流值變低,誤差率有較為明顯的增大。在仿真通氣實驗過程中,模擬人體生物肺的氣阻值主要參考表1中的數據進行處理,在實際通氣過程中氣阻值會隨著氣流的大小而變化,產生一定的誤差。
此外,在PRVC正壓通氣模式下,以機械通氣提供的外部壓力Pv作為反饋控制量,控制機械通氣的氣壓量和氣流量,達到設定潮氣量值。在實際應用中避免了在模擬人體生物肺當中內置任何傳感器,有利于保護生物肺肺體不受破壞,又有利于整個通氣算法順利移植到實驗平臺中。接下來的工作除了對實驗平臺進行研究與實現,還需解決以下幾點問題:① 結合先進PID控制算法[27]大幅度提高通氣精度,減小誤差;② 針對模擬人體生物肺的氣阻值隨著氣流大小變化的問題,將結合文獻[12]在線測算氣阻和順應性的方法予以解決;③ 在通氣實驗過程中,是通過控制風機加速和減速來實現通氣壓力的切換,而利用比例通氣閥達到快速切換通氣壓力的方法,值得在平臺通氣實驗中深入研究。
5 結論
本文以模擬人體生物肺為研究對象,介紹了所設計的模擬人體生物肺電學仿真通氣模型。基于所建立的仿真通氣系統模型,進行正壓通氣實驗。實驗結果表明,在PRVC正壓通氣模式下,主要參考指標潮氣量值的平均誤差為9.8%,能有效模擬正常成人的通氣效果。結果說明了所建立的電學仿真通氣模型具有可行性,為模擬人體生物肺正壓通氣實驗平臺的實現提供了條件,也有助于研究人員觀測氣壓、氣流和潮氣量等參數,了解正壓通氣模式下實驗平臺的通氣效果,調整和改進實驗平臺的控制策略。
重要聲明
利益沖突聲明:本文全體作者均聲明不存在利益沖突。
作者貢獻聲明:嚴欽城是本研究的實驗設計者和實驗研究的執行人,完成數據分析,論文寫作;吳全玉是項目的構思者及負責人,指導實驗設計、數據分析、論文修改;張偉民、潘玲佼、劉曉杰、陶為戈參與實驗設計和試驗結果分析。
0 引言
肺部疾病是威脅人們身體健康和生命安全的嚴重疾病。肺部介入診療方案在肺部疾病的早期篩查和診斷中起到了重要作用,并且能夠顯著提高患者預后[1]。隨著患者對肺部疾病診療需求的增加,國內的肺部介入診療方案也有了蓬勃發展,出現了各種新型肺部介入診療器械,如電磁導航支氣管鏡、虛擬支氣管鏡導航等,并應用于臨床診療當中[2-5]。模擬人體生物肺是醫務人員掌握和練習新型肺部介入診療器械的重要方式之一,醫務人員通過它進行練習或教學[6],可以有效降低新型肺部介入診療器械的臨床應用風險,更好地服務于患者。
在臨床上,治療呼吸困難或無自主呼吸患者的通氣模式可分為兩種[7-8],分別為正壓通氣模式和負壓通氣模式。隨著醫學技術的發展,負壓通氣治療模式已經逐漸被淘汰,各種類型的正壓通氣模式成為了研究熱點。文獻[9-10]在建立的呼吸仿真模型基礎上,開展了正壓通氣下呼吸道內氣流和氣壓的研究。文獻[11-12]以通氣裝置和患者呼吸道為研究對象,建立了無創通氣治療系統模型,在此基礎上開展了對無創雙水平正壓通氣模式的研究。文獻[13]分別對三種新型正壓通氣模式下的人機同步性能進行了研究。文獻[14-15]基于電路學建立呼吸系統模型,研究了新型正壓通氣模式。鑒于正壓通氣模式的重要性,如果將之應用于模擬人體生物肺,可以幫助醫務人員更好地了解通氣效果,減少或避免臨床通氣所存在的風險,對肺部疾病通氣治療有著指導意義。然而,模擬人體生物肺在正壓通氣模式下的參數配置復雜[16-17],還具有氣壓和氣流波形呈現緩慢等缺點。針對這些問題,本文基于Matlab建立模擬人體生物肺電學仿真通氣模型,開展仿真正壓通氣實驗,為模擬人體生物肺的正壓通氣實驗平臺的實現提供了條件,同時也能快速改進實驗平臺的控制策略。
1 模擬人體生物肺
模擬人體生物肺主要應用于肺部介入診療器械的演示和教學中,如圖1所示,是由生物肺肺體、由令接頭和生物肺肺箱等部分組成。其中生物肺肺體是豬肺經過特殊灌洗方法制作而成,擁有主氣管、左右支氣管和肺內各級支氣管等結構。在研究正壓通氣時,模擬人體生物肺各級氣管內的氣流分別受到了黏性氣阻、慣性氣阻以及彈性氣阻的作用[18-20],借用電學符號,將它們分別等效為電路學中的電阻R、電感L和電容C。模擬人體生物肺各級氣阻參考值如表1所示。
圖1
模擬人體生物肺
Figure1.
Simulation of the human biological lung
如圖2a所示,取直徑為d、長度為l的氣管,將氣管分為兩段,長度分別為l1和l2,它們之間的關系為l = l1 + l2,其中一端和容積為V的肺泡相連接。此結構類似于電學中的串聯結構[21-24],它們對應的黏性氣阻和慣性氣阻分別為R、R1、R2和L、L1、L2,具體的關系如式(1)所示。
圖2
氣管結構
a. 串聯結構;b. 并聯結構
Figure2. Trachea structurea. series structure; b. parallel structure
|
如圖2b所示,取兩段長度分別為l3和l4、直徑都為d的氣管,分別與容積V1和V2的肺泡相連接,它們對應的黏性氣阻和慣性氣阻分別表示為R、R1、R2和L、L1、L2。V1和V2的彈性氣阻分別表示為C1和C2。這種結構類似于電學中的并聯結構[21-24],具體的關系如式(2)所示。
|
利用電路學中串聯和并聯關系,建立模擬人體生物肺的電學通氣模型。將生物肺左邊部分對應的黏性氣阻RLL、慣性氣阻LLL和彈性氣阻CLL和生物肺右邊部分對應的黏性氣阻RLR、慣性氣阻LLR和彈性氣阻CLR進行整合,分別用RL、LL和CL來表示左右肺泡的總黏性氣阻、慣性氣阻和彈性氣阻。主通氣管道對應的阻值分別表示為黏性氣阻RT、慣性氣阻LT和彈性氣阻CT,機械通氣提供的外部氣壓壓力表示為Pv,生物肺內部的實際氣壓壓力表示為Pc,流經主通氣管道和子支氣管的氣流流量分別用QT和QL表示。模擬人體生物肺電學仿真通氣模型,如圖3所示,圖中各物理量滿足的關系如式(3)所示。
圖3
模擬人體生物肺電學仿真通氣模型
Figure3.
Electrical simulation ventilation model for simulated human biological lung
|
2 模擬人體生物肺PRVC通氣模型
壓力調節容積控制模式(pressure regulated volume control,PRVC),是一種結合壓力控制和容量控制的先進正壓通氣模式[14]。在臨床治療中,在壓力控制正壓通氣模式下,通氣量會隨著通氣管道和肺部的順應性變化而變化,有可能出現通氣量不足的情況。容量控制正壓通氣模式,在保證有通氣量情況下,很可能會出現氣道壓力過大的情況,給患者造成氣壓傷。PRVC正壓通氣模式克服了這兩種正壓通氣模式的不足,在保證潮氣量的基礎上可自動調節氣道壓力水平,調節的過程如圖4所示。
圖4
PRVC模式調節過程
Figure4.
Regulation process of PRVC mode
在圖4中,ΔPmax的值設定為壓力最大值與實際氣壓值的差值。ΔP的調整值與增益值K[25-26]、實際的潮氣量和設定的潮氣量值相關,具體定義如式(4)所示。其中,增益值K如果選得過高,容易引起潮氣量值的震蕩;如果選得過低,則會造成氣壓調整響應速度減慢。研究發現當K=6時,氣壓壓力值有顯著的變化,并且可避免潮氣量值產生震蕩。
|
根據PRVC正壓通氣模式自動調節氣道壓力值的特點,建立以氣道壓力值為反饋的控制系統,系統框圖如圖5所示。圖中C(s)為機械通氣控制函數,Pv(s)為機械通氣輸出的氣壓函數,G1(s)為PRVC模式控制函數,G2(s)為PRVC模式傳輸函數,H(s)為一階濾波器,Pc(s)是模擬人體生物肺內部的實際壓力函數。其中C(s)、G1(s)、G2(s)和H(s)的定義如式(5)所示。
圖5
模擬人體生物肺PRVC正壓通氣控制系統
Figure5.
PRVC positive pressure ventilation control system for simulated human biological lung
|
結合表1模擬人體生物肺氣阻數據、式(3)和式(5),在PRVC正壓通氣模式下,系統的開環傳遞函數計算如式(6)所示。
|
通過計算,可以得到系統的零點分別是z1 = –3 445.53,z2 = –858.21,極點分別是p1 = –2.256,p2 = –885.41,p3 = –
|
3 仿真實驗與結果
搭建的模擬人體生物肺正壓通氣系統仿真模型如圖6所示。仿真模型主要包括兩大模塊,分別為控制模塊和傳輸模塊。其中控制模塊如圖7所示,傳輸模塊如圖8所示。
圖6
模擬人體生物肺正壓通氣系統仿真模型
Figure6.
Simulation model of simulated human biological lung positive pressure ventilation system
圖7
模擬人體生物肺正壓通氣系統控制模塊
Figure7.
Control module of simulated human biological lung positive pressure ventilation system
圖8
模擬人體生物肺正壓通氣系統傳輸模塊
Figure8.
Transmission module of simulated human biological lung positive pressure ventilation system
上述圖中VT表示設定潮氣量值,TV表示實際潮氣量值,P_vent表示機械通氣提供的外部壓力,P_CS表示生物肺內部的實際壓力,V表示經過調整后的潮氣量值,V_dot表示經過調整后的氣流量值。由于模擬人體生物肺沒有呼氣末正壓,PEEP參數設置為0。在仿真實驗中,設定了壓力最大值Pmax和初始目標潮氣量值,分別為30 cm H2O和500 mL,呼吸頻率為12次/min,一階濾波器的時間常數τf 設定為50 ms,PEEP 為0 cm H2O,增益值K為6。具體仿真實驗結果如圖9所示。
圖9
PRVC模式仿真實驗結果
a. 模擬人體生物肺仿真通氣數據曲線;b. 正常成人通氣數據曲線
Figure9. Simulation results of PRVC modela. simulation ventilation data wave of simulated human biological lung; b. ventilation data wave of normal adult
結合圖9讀取Δt時間段內模擬人體生物肺和正常成人在時刻點t = 10、20、30、40、50 s 的通氣數據,具體如表2所示。
4 討論
本文在Matlab上成功進行了模擬人體生物肺仿真正壓通氣實驗,由于模擬人體生物肺內部不具備殘氣量,在正壓通氣模式開始前肺體呈塌陷狀態,氣體進入生物肺肺泡的傳輸距離更近,從圖9a 中可以看出,在通氣開始階段所需初始目標氣道壓力值小于正常成人,達到初始氣道目標壓力值后開始逐一改變氣道壓力,以達到目標的潮氣量值。在t = 30 s時,通過調整通氣氣壓值,成功獲得了期望的潮氣量值。仿真所得到的通氣數據如表2所示。在Δt時間段內,潮氣量的平均誤差率為9.8%,氣流量的平均誤差率為17.6%,氣壓量平均誤差率為21.8%。針對仿真結果誤差進行分析,所建立的仿真通氣模型不同于正常成人的肺部結構,模擬人體生物肺沒有鼻、咽喉等器官組織的影響,氣流以更快的速度到達肺泡。通過圖9a可以看出,在前30 s初始通氣階段,所需的氣壓和潮氣量低于正常成人;在t = 40 s時,如圖9a與圖9b紅圈標注對比所示,正常成人存在自主呼吸用力,使得所需的氣壓和氣流值變低,誤差率有較為明顯的增大。在仿真通氣實驗過程中,模擬人體生物肺的氣阻值主要參考表1中的數據進行處理,在實際通氣過程中氣阻值會隨著氣流的大小而變化,產生一定的誤差。
此外,在PRVC正壓通氣模式下,以機械通氣提供的外部壓力Pv作為反饋控制量,控制機械通氣的氣壓量和氣流量,達到設定潮氣量值。在實際應用中避免了在模擬人體生物肺當中內置任何傳感器,有利于保護生物肺肺體不受破壞,又有利于整個通氣算法順利移植到實驗平臺中。接下來的工作除了對實驗平臺進行研究與實現,還需解決以下幾點問題:① 結合先進PID控制算法[27]大幅度提高通氣精度,減小誤差;② 針對模擬人體生物肺的氣阻值隨著氣流大小變化的問題,將結合文獻[12]在線測算氣阻和順應性的方法予以解決;③ 在通氣實驗過程中,是通過控制風機加速和減速來實現通氣壓力的切換,而利用比例通氣閥達到快速切換通氣壓力的方法,值得在平臺通氣實驗中深入研究。
5 結論
本文以模擬人體生物肺為研究對象,介紹了所設計的模擬人體生物肺電學仿真通氣模型。基于所建立的仿真通氣系統模型,進行正壓通氣實驗。實驗結果表明,在PRVC正壓通氣模式下,主要參考指標潮氣量值的平均誤差為9.8%,能有效模擬正常成人的通氣效果。結果說明了所建立的電學仿真通氣模型具有可行性,為模擬人體生物肺正壓通氣實驗平臺的實現提供了條件,也有助于研究人員觀測氣壓、氣流和潮氣量等參數,了解正壓通氣模式下實驗平臺的通氣效果,調整和改進實驗平臺的控制策略。
重要聲明
利益沖突聲明:本文全體作者均聲明不存在利益沖突。
作者貢獻聲明:嚴欽城是本研究的實驗設計者和實驗研究的執行人,完成數據分析,論文寫作;吳全玉是項目的構思者及負責人,指導實驗設計、數據分析、論文修改;張偉民、潘玲佼、劉曉杰、陶為戈參與實驗設計和試驗結果分析。