


引用本文: 謝彬, 胥鴻達, 鄧海濤, 李明凡, 趙生鑫, 張磊, 王鐵衡, 卿培東. 機器人輔助經皮螺釘治療胸腰椎骨折的療效分析. 華西醫學, 2024, 39(10): 1537-1542. doi: 10.7507/1002-0179.202408051 復制
版權信息: ?四川大學華西醫院華西期刊社《華西醫學》版權所有,未經授權不得轉載、改編
脊柱骨折是指脊柱骨性結構的破壞,多由外傷所致,發病急,病情嚴重,致殘率和致死率較高[1]。作為脊柱骨折中的高發部位,胸腰椎骨折占其骨折總量的 90%以上[2-3]。癥狀多因外力使胸腰椎骨質連續性受到過多破壞而導致[4-5],體現為椎體不穩、腰背部劇烈疼痛,嚴重者可出現不同程度大小便功能障礙、截癱等[6-7]。治療方案可分為保守和手術治療。手術又可分為骨折復位椎弓根螺釘內固定、嚴重者需要椎弓根螺釘內固定聯合椎間減壓融合甚至錐體切除等[8]。而作為脊柱內固定標準技術的椎弓根螺釘技術[9],臨床應用廣泛,徒手植釘已經成為脊柱外科醫師的常規技能,但螺釘穿破椎弓根皮質損傷周圍組織等情況時有發生。高危并發癥包括神經、血管、內臟損傷及錐體穩定性下降等[10]。近年來隨著精準醫療和智能化技術的發展,微創化理念得到普及,特別是手術機器人的引入,為椎弓根螺釘技術的發展帶來了長足進步。大量文獻報道證明了機器人植釘的準確性[11-13]。而作為國內唯一使用直觀定位,也是全球唯一支持局部麻醉下手術的骨科機器人(PSIS-A 型脊柱外科手術導航定位設備)。它能夠結合透視校準圖像和機器人術前圖像空間的配準,給出僅使用1張 X 線圖像計算機器人瞄準運動和評估瞄準精度的公式,該方法的輻射暴露和手術時間較少。但其植釘準確率未見明確報道。2022 年為該款機器人在綿陽市骨科醫院(以下簡稱我院)開始試用。故本研究擬通過比較我院 PSIS-A 型機器人與徒手經皮椎弓根螺釘植入內固定術治療胸腰椎骨折患者的臨床效果,來探究其在胸腰椎骨折治療中的臨床應用價值。
1 對象與方法
1.1 研究對象
選取我院 2022 年 8 月—2024 年 1 月因胸腰椎骨折需行經皮椎弓根螺釘內固定術的患者。納入標準:① 無手術禁忌證;② 影像學檢查及臨床癥狀符合胸腰椎骨折診斷;③ 無神經及脊髓損傷;④ 單節段胸腰椎骨折;⑤ 受傷時間不超過 12 d 的新鮮骨折。排除標準:① 合并有神經功能損傷;② 隨訪過程中失訪;③ 病理性骨折;④ 陳舊性骨折;⑤ 骨折分型為 AO 分型中的 B、C 型。本研究已通過綿陽市骨科醫院倫理委員會倫理審批[倫理(2022)第6號]。
根據查閱文獻以及預試驗結果,設雙側檢驗水準α=0.05,把握度為 90%。根據樣本量計算公式可得 n=22,考慮到 1∶1 隨機化分組,即每組各需研究對象 22 例,考慮 20%失訪數據,最終每組樣本量為 26 例。
1.2 研究方法
1.2.1 分組
通過隨機數字表分組法將入組患者分為機器人組(試驗組)與徒手組(對照組)。
1.2.2 治療方法
① 機器人組。所有患者術前均常規行 X 線片、CT、MRI 檢查,使用 PSIS-A 型機器人和北京富樂微創椎弓根釘棒系統進行骨折復位內固定。導入患者術前 CT 資料至機器人電腦進行術前規劃。術中患者全身麻醉后取俯臥位,C 臂透視定位傷椎及上下錐體后,將術中圖像與術前規劃通過特征點匹配、配準。匹配完成后,機械臂攜帶導向器自行運動至規劃椎弓根螺釘植入的軸線上。再次進行 C 臂透視,依據直觀圖像判斷定位無誤后,手動沿導向器方向經皮穿刺相應錐體椎弓根,正側位透視下進入錐體前 1/3 處,確定穿刺無誤后置入導絲,攻絲擴張通道,C 臂再次透視確認位置良好,植入椎弓根螺釘。相同方法分別于傷椎及上下椎椎弓根植入椎弓根螺釘,經 C 臂透視滿意后安裝連接棒,行骨折撐開復位,擰緊螺帽。沖洗傷口,縫合皮膚,結束手術。機器人輔助手術過程及手術前后像見圖1。
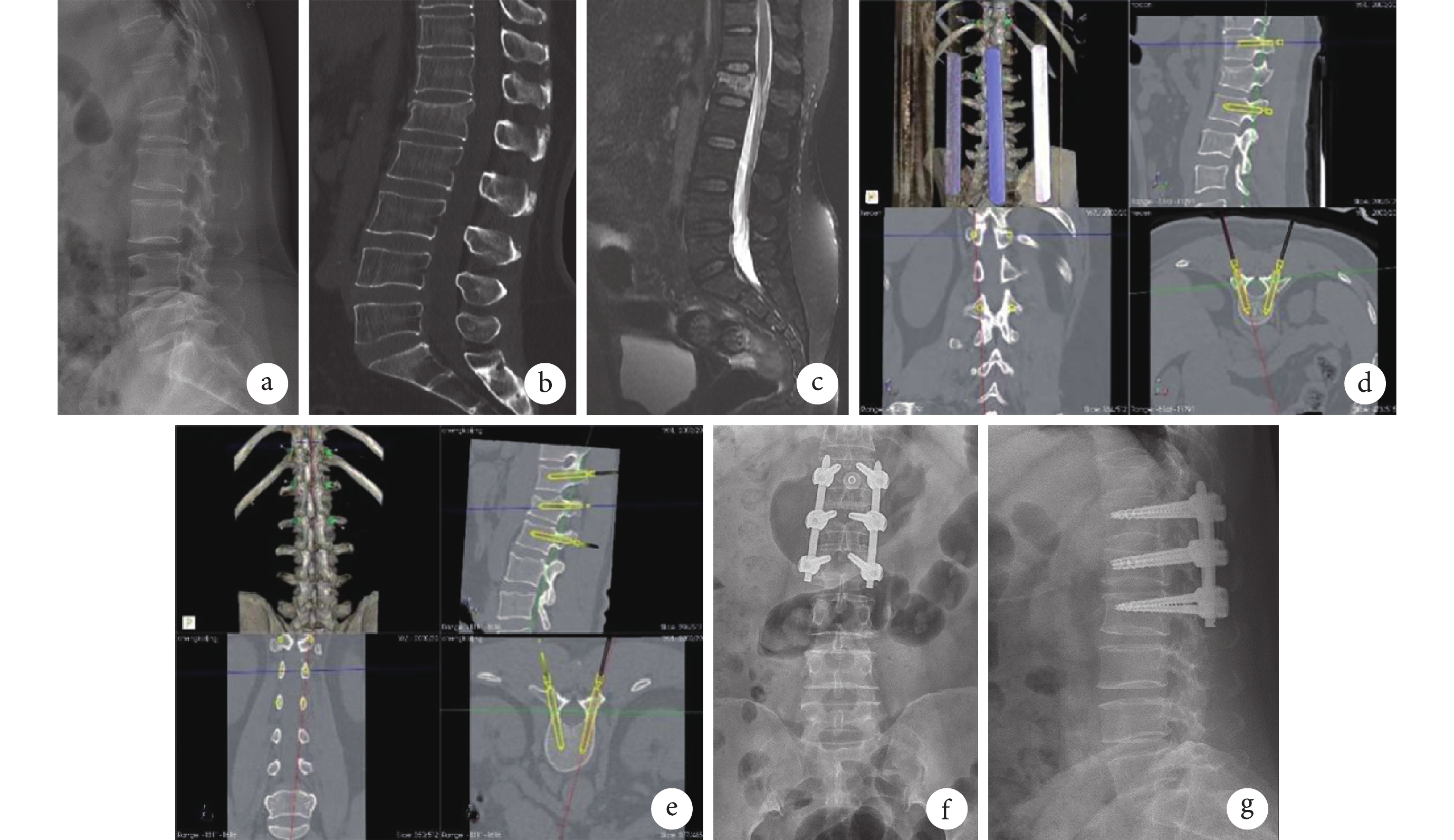 圖1
機器人輔助手術過程及手術前后像
圖1
機器人輔助手術過程及手術前后像
a. 術前腰椎側位 X 線片;b. 術前腰椎 CT 矢狀位片;c. 術前腰椎 MRI 矢狀位片;d. 術前機器人規劃骨折上下錐體植釘路徑;e. 術前機器人規劃骨折錐體植釘路徑;f. 術后復查腰椎正位片;g. 術后復查腰椎側位片。患者,女,53 歲,腰 1 骨折
② 徒手組。所有患者術前均常規行 X 線片、CT、MRI 檢查。術中患者全身麻醉后取俯臥位,C 臂透視定位傷椎及上下錐體。在 C 臂透視引導下經皮穿刺相應錐體椎弓根,正側位透視下進入錐體前 1/3 處,確定穿刺無誤后置入導絲,攻絲擴張通道,C 臂再次透視確認位置良好,植入椎弓根螺釘。相同方法分別于傷椎及上下椎椎弓根植入椎弓根螺釘,經 C 臂透視滿意后安裝連接棒,行骨折撐開復位,擰緊螺帽。沖洗傷口,縫合皮膚,結束手術。
1.2.3 術后處理
兩組患者術后 24 h 均靜脈滴注抗菌藥物預防感染,術后第 1 天(不含手術當日)開始行腰背肌鍛煉,術后第 3 天在支具保護下下床活動。
1.3 觀察指標
1.3.1 一般情況
記錄兩組患者性別、體重等基本情況。
1.3.2 術中觀察指標
記錄兩組患者手術時間、術中出血量、術中輻射時間及劑量。
1.3.3 術前及術后隨訪
術前 1 d、術后第 3 天隨訪記錄兩組患者疼痛視覺模擬評分法(Visual Analogue Scale, VAS)評分;末次隨訪時(術后 6 個月)行 X 線及 CT 檢查評估并統計患者螺釘松動率(松動例數/患者總例數),統計遺留(神經癥狀、疼痛等)并發癥率(并發癥例數/患者總例數×100%)、翻修率(手術翻修例數/患者總例數×100%)。
1.3.4 影像指標
患者術后第 3 天常規復查 X 線片及 CT。依據 CT 圖像,通過 Gertzbein 和 Robbins 量表[14]對椎弓根位置進行分級:A 級,螺釘完全位于椎弓根內;B 級,椎弓根皮質侵犯<2 mm;C 級,2 mm<椎弓根皮質侵犯<4 mm;D 級,4 mm<椎弓根皮質侵犯<6 mm;E 級,椎弓根皮質侵犯>6 mm。比較兩組患者螺釘位置優秀(A 級)率和臨床可接受(A 級+B 級)率。采用 Bub 評分[15]評價螺釘近端小關節侵犯情況:0 級(螺釘不在小關節面內)、1 級(螺釘在側面小關節面但不在小平面關節內)、2 級(小平面關節穿透度<1 mm)和 3 級(小關節穿透度>1 mm 或在小平面內移動)。
1.4 數據篩選
告知所有被納入的患者研究流程,并簽署知情同意書;將每位患者的個人信息和評估數據收集和保存在電腦里,通過計算機生成的隨機數字表,并由 1 名副主任醫師從一個密封的信封中隨機抽取數字,以 1∶1 的比例隨機分為 2 組;由 1 名不知曉分組以及不參與研究的醫師對患者進行觀察指標評估。
1.5 質量控制
① 試驗前制定質量控制標準,相關人員進行培訓;② 收集病例嚴格按照納排除及脫落標準并簽署知情同意書;③ 減少不良事件發生;④ 研究的質量把控,由醫院科技處和藥物臨床試驗管理部門進行監管。
1.6 統計學方法
采用 SPSS 25.0 統計軟件對數據進行分析。符合正態分布的計量資料采用均數±標準差表示,組間比較采用獨立樣本 t 檢驗;非正態分布的計量資料采用中位數(下四分位數,上四分位數)表示,組間比較 Wilcoxon 秩和檢驗。計數資料采用例數和百分比表示,組間比較采用 Pearson χ2 檢驗。正態分布計量資料的效應量采用均數差,偏態分布計量資料的效應量采用中位數差,并計算均數差和中位數差的 95%置信區間(confidence interval, CI)。雙側檢驗水準α=0.05。
2 結果
2.1 一般情況
共納入患者 60 例。其中,機器人組 28 例,徒手組 32 例。機器人組與徒手組在男女例數[17/11例vs.16/16例;χ2=0.693,P=0.567]、體質量指數[(64.9±9.95)vs.(63.3±8.49)kg/m2;t=0.721,P=0.505]比較,差異均無統計學意義。
2.2 兩組患者手術前后 VAS 評分比較
兩組患者手術前后 VAS 評分比較見表1。可見,機器人組術后第 3 天 VAS 評分優于徒手組(P=0.003)。
2.3 術中觀察指標
兩組患者術中觀察指標比較見表2。可見,除術中出血量、術中輻射次數外(P>0.05),機器人組的手術時間、平均植釘時間、術中輻射劑量均低于徒手組(P<0.05)。
2.4 兩組患者植釘準確率及小關節侵犯率比較
兩組患者兩組患者植釘準確率及小關節侵犯率比較見表3。可見,機器人組共植入椎弓根螺釘 166 枚,其中優秀(A 級)157 枚(94.6%),可接受(A 級+B 級)160 枚(96.4%);徒手組共植入椎弓根螺釘 192 枚,其中優秀(A 級)163 枚(84.9%),可接受(A 級+B 級)175 枚(91.1%)。機器人組植釘準確優秀率高于徒手組(χ2=7.806,P=0.005);兩組植釘準確可接受率比較,差異無統計學意義(χ2=3.240,P=0.072)。機器人組螺釘小關節侵犯率為 7.2%(12/166),徒手組為 14.1%(27/192),兩組比較差異無統計學意義(χ2=3.608,P=0.058)。
2.5 術后并發癥
術后末次隨訪時行 X 線及 CT 檢查均未發現螺釘松動及翻修病例。所有患者均未遺留神經癥狀。
3 討論
脊柱骨折占全身骨折的 5%~6%,其中胸腰段是脊柱胸彎和腰彎的移行區,應力匯聚、生物力學薄弱處,此節段骨折最為常見[16]。本病治療主要目的是恢復脊柱原有的結構及其穩定性[17]。傳統切開復位椎弓根螺釘內固定可良好復位骨折椎體,術后即刻維持脊柱的三柱穩定性,一直被認為是治療無神經癥狀非骨質疏松性胸腰椎骨折的“金標準”[18]。但存在軟組織干擾大、出血多、感染風險較高等弊端,且部分患者術后會出現腰背部脹痛等臨床癥狀[19]。而隨著脊柱微創技術的發展,多個文獻證明經皮微創椎弓根螺釘內固定是治療包括胸腰椎骨折在內的多種脊柱疾病準確、可靠且安全的方法[20-21]。有研究表明經皮微創椎弓根螺釘內固定治療胸腰段椎體骨折不僅減少了出血風險、軟組織損傷且減輕患者術后疼痛[22]。然而,Babu 等[15]報道了經皮放置椎弓根螺釘與使用開放螺釘相比,關節突關節的侵犯率更高。Patel 等[23]進行的一項尸體研究結果顯示,經皮穿刺植入椎弓根螺釘可導致 58%的小關節破壞率,此外他們認為侵犯關節囊或小關節后撞擊和不穩定是導致術后疼痛的原因之一[24]。因此,在脊柱經皮微創植釘的基礎上如何有效提高植釘準確性以及減少關節突關節侵犯率將是有效提高醫療質量的重要一環。
大量文獻報道了包括 Renaissance 機器人[25]、ExcelsiusGPS 機器人[26]、Mazor 機器人[27]、天璣機器人[28]等導航系統在椎弓根螺釘植釘的多個方面均優于徒手置釘,可見機器人在未來脊柱外科手術方面應用前景巨大。相較于其他類型機器人而言,PSIS-A 型骨科機器人是國內唯一使用直觀定位,也是全球唯一支持局部麻醉下手術的骨科機器人。該機器人依據術前 CT 數據設計釘道位置,術中無需有創標記、三維掃描,通過直觀圖像數據,以雙圓環瞄準方式,充分展示定位通道與椎弓根輪廓相對位置,方便術者及時發現和糾正手術路徑偏移。這種直觀展示方法同時避免了術中掃描、配準等操作環節,減少精度損失,一定程度上提高了植釘精度。但在使用過程中,本研究團隊發現由于缺少實時追蹤,當完成釘道確認后,需要在患者發生移動前,盡快完成穿刺操作,避免發生錯位;亦推測在患者皮膚表面增加追蹤標記可避免此類問題發生。
本研究團隊發現,相較于徒手植入椎弓根螺釘,機器人植釘優秀率明顯更高(P<0.05);徒手組螺釘的可接受率為 91.1%,PSIS-A 型機器人的植釘可接受率為 96.4%,明顯優于徒手植釘。這同以往有關機器人的研究內容一致[11-13]。同時一篇 Meta 分析也報道了相同的結果[29]。本研究結果分析徒手植釘準確率較低可能和僅依靠術中透視定位,其植釘進針點和進針方向不夠準確有關,同時與手術床固定不可靠、術中牽拉軟組織,使體位發生變化、呼吸因素等也有關[25]。而在 Hou 等[25]的研究結果中,機器人輔助技術椎弓根螺釘植入的準確率方面相較于徒手植釘并未見明顯優勢。分析這可能和樣本量、研究對象(脊柱側彎矯形)、椎弓根發育差異等多方面原因有關。在小關節突關節侵犯率方面,徒手植釘為 14.1%,機器人輔助植釘為 7.2%,可見機器人優勢明顯。術后第 3 天兩組間存在明顯差異(P<0.001)。這和 Patel 等[23]關于關節囊或小關節侵犯后撞擊和不穩是術后疼痛的誘因之一的結論相符。同時,本研究發現機器人輔助植釘在縮短手術時間、減少術中輻射等方面均有著明顯當然優勢,Fan 等[30]在比較脊柱外科多種引導技術中椎弓根螺釘植入的準確性中也發現機器人輔助技術能顯著減少不良事件、每顆螺釘透視時間。然而雖然機器人輔助植釘相較于徒手植釘能夠節省手術時間,但在本研究團隊早期手術病例中卻有著截然相反的結果,往往是機器人輔助手術更為耗時,這種現象在手術病例累計 10 余例以后才逐步改善。由此可見,即使是經驗豐富的高年資脊柱外科醫生,依舊需要經過一定的學習曲線,才能夠發揮出機器人的優勢。通過本研究可認為 PSIS-A 型機器人雖然沒有術中實時監測功能,但其在經皮椎弓根螺釘植入手術中相較于傳統徒手植釘依然有著顯著的優勢,具有巨大的臨床應用前景。
本研究也存在一定的缺陷。首先,本研究只比較了機器人與徒手植釘的情況,并不清楚該機器人與市面上其他類型機器人比較孰強孰弱;其次,雖然本研究顯示機器人在植釘準確率以及小關節侵犯率上均較徒手植釘有著明顯的優勢,但同其他機器人一樣,依然存在著植釘飄移現象。Du 等[31]的研究認為機器人是將術前 CT 和術中透視圖像相匹配,再根據術前 CT 數據規劃椎弓根螺釘軌跡,如果術中患者體位與術前 CT 掃描時不一致,可能會降低植入的準確性。同時,術中患者呼吸、手術牽拉等也會造成一定影響;因此,如何在現有機器人技術基礎上進一步提高植釘準確率及小關節侵犯率,避免術中植釘過程中螺釘偏移現象的發生將時我們接下來研究的重點。
綜上所述,PSIS-A 型機器人輔助經皮微創椎弓根螺釘內固定術治療胸腰椎骨折相較于徒手經皮微創椎弓根螺釘植入術可取的更好的臨床療效。并且能夠提高螺釘植入準確率,降低小關節侵犯率,縮短手術時間,減少患者術中輻射劑量,值得臨床進一步推廣應用。
利益沖突:所有作者聲明不存在利益沖突。
脊柱骨折是指脊柱骨性結構的破壞,多由外傷所致,發病急,病情嚴重,致殘率和致死率較高[1]。作為脊柱骨折中的高發部位,胸腰椎骨折占其骨折總量的 90%以上[2-3]。癥狀多因外力使胸腰椎骨質連續性受到過多破壞而導致[4-5],體現為椎體不穩、腰背部劇烈疼痛,嚴重者可出現不同程度大小便功能障礙、截癱等[6-7]。治療方案可分為保守和手術治療。手術又可分為骨折復位椎弓根螺釘內固定、嚴重者需要椎弓根螺釘內固定聯合椎間減壓融合甚至錐體切除等[8]。而作為脊柱內固定標準技術的椎弓根螺釘技術[9],臨床應用廣泛,徒手植釘已經成為脊柱外科醫師的常規技能,但螺釘穿破椎弓根皮質損傷周圍組織等情況時有發生。高危并發癥包括神經、血管、內臟損傷及錐體穩定性下降等[10]。近年來隨著精準醫療和智能化技術的發展,微創化理念得到普及,特別是手術機器人的引入,為椎弓根螺釘技術的發展帶來了長足進步。大量文獻報道證明了機器人植釘的準確性[11-13]。而作為國內唯一使用直觀定位,也是全球唯一支持局部麻醉下手術的骨科機器人(PSIS-A 型脊柱外科手術導航定位設備)。它能夠結合透視校準圖像和機器人術前圖像空間的配準,給出僅使用1張 X 線圖像計算機器人瞄準運動和評估瞄準精度的公式,該方法的輻射暴露和手術時間較少。但其植釘準確率未見明確報道。2022 年為該款機器人在綿陽市骨科醫院(以下簡稱我院)開始試用。故本研究擬通過比較我院 PSIS-A 型機器人與徒手經皮椎弓根螺釘植入內固定術治療胸腰椎骨折患者的臨床效果,來探究其在胸腰椎骨折治療中的臨床應用價值。
1 對象與方法
1.1 研究對象
選取我院 2022 年 8 月—2024 年 1 月因胸腰椎骨折需行經皮椎弓根螺釘內固定術的患者。納入標準:① 無手術禁忌證;② 影像學檢查及臨床癥狀符合胸腰椎骨折診斷;③ 無神經及脊髓損傷;④ 單節段胸腰椎骨折;⑤ 受傷時間不超過 12 d 的新鮮骨折。排除標準:① 合并有神經功能損傷;② 隨訪過程中失訪;③ 病理性骨折;④ 陳舊性骨折;⑤ 骨折分型為 AO 分型中的 B、C 型。本研究已通過綿陽市骨科醫院倫理委員會倫理審批[倫理(2022)第6號]。
根據查閱文獻以及預試驗結果,設雙側檢驗水準α=0.05,把握度為 90%。根據樣本量計算公式可得 n=22,考慮到 1∶1 隨機化分組,即每組各需研究對象 22 例,考慮 20%失訪數據,最終每組樣本量為 26 例。
1.2 研究方法
1.2.1 分組
通過隨機數字表分組法將入組患者分為機器人組(試驗組)與徒手組(對照組)。
1.2.2 治療方法
① 機器人組。所有患者術前均常規行 X 線片、CT、MRI 檢查,使用 PSIS-A 型機器人和北京富樂微創椎弓根釘棒系統進行骨折復位內固定。導入患者術前 CT 資料至機器人電腦進行術前規劃。術中患者全身麻醉后取俯臥位,C 臂透視定位傷椎及上下錐體后,將術中圖像與術前規劃通過特征點匹配、配準。匹配完成后,機械臂攜帶導向器自行運動至規劃椎弓根螺釘植入的軸線上。再次進行 C 臂透視,依據直觀圖像判斷定位無誤后,手動沿導向器方向經皮穿刺相應錐體椎弓根,正側位透視下進入錐體前 1/3 處,確定穿刺無誤后置入導絲,攻絲擴張通道,C 臂再次透視確認位置良好,植入椎弓根螺釘。相同方法分別于傷椎及上下椎椎弓根植入椎弓根螺釘,經 C 臂透視滿意后安裝連接棒,行骨折撐開復位,擰緊螺帽。沖洗傷口,縫合皮膚,結束手術。機器人輔助手術過程及手術前后像見圖1。
圖1
機器人輔助手術過程及手術前后像
a. 術前腰椎側位 X 線片;b. 術前腰椎 CT 矢狀位片;c. 術前腰椎 MRI 矢狀位片;d. 術前機器人規劃骨折上下錐體植釘路徑;e. 術前機器人規劃骨折錐體植釘路徑;f. 術后復查腰椎正位片;g. 術后復查腰椎側位片。患者,女,53 歲,腰 1 骨折
② 徒手組。所有患者術前均常規行 X 線片、CT、MRI 檢查。術中患者全身麻醉后取俯臥位,C 臂透視定位傷椎及上下錐體。在 C 臂透視引導下經皮穿刺相應錐體椎弓根,正側位透視下進入錐體前 1/3 處,確定穿刺無誤后置入導絲,攻絲擴張通道,C 臂再次透視確認位置良好,植入椎弓根螺釘。相同方法分別于傷椎及上下椎椎弓根植入椎弓根螺釘,經 C 臂透視滿意后安裝連接棒,行骨折撐開復位,擰緊螺帽。沖洗傷口,縫合皮膚,結束手術。
1.2.3 術后處理
兩組患者術后 24 h 均靜脈滴注抗菌藥物預防感染,術后第 1 天(不含手術當日)開始行腰背肌鍛煉,術后第 3 天在支具保護下下床活動。
1.3 觀察指標
1.3.1 一般情況
記錄兩組患者性別、體重等基本情況。
1.3.2 術中觀察指標
記錄兩組患者手術時間、術中出血量、術中輻射時間及劑量。
1.3.3 術前及術后隨訪
術前 1 d、術后第 3 天隨訪記錄兩組患者疼痛視覺模擬評分法(Visual Analogue Scale, VAS)評分;末次隨訪時(術后 6 個月)行 X 線及 CT 檢查評估并統計患者螺釘松動率(松動例數/患者總例數),統計遺留(神經癥狀、疼痛等)并發癥率(并發癥例數/患者總例數×100%)、翻修率(手術翻修例數/患者總例數×100%)。
1.3.4 影像指標
患者術后第 3 天常規復查 X 線片及 CT。依據 CT 圖像,通過 Gertzbein 和 Robbins 量表[14]對椎弓根位置進行分級:A 級,螺釘完全位于椎弓根內;B 級,椎弓根皮質侵犯<2 mm;C 級,2 mm<椎弓根皮質侵犯<4 mm;D 級,4 mm<椎弓根皮質侵犯<6 mm;E 級,椎弓根皮質侵犯>6 mm。比較兩組患者螺釘位置優秀(A 級)率和臨床可接受(A 級+B 級)率。采用 Bub 評分[15]評價螺釘近端小關節侵犯情況:0 級(螺釘不在小關節面內)、1 級(螺釘在側面小關節面但不在小平面關節內)、2 級(小平面關節穿透度<1 mm)和 3 級(小關節穿透度>1 mm 或在小平面內移動)。
1.4 數據篩選
告知所有被納入的患者研究流程,并簽署知情同意書;將每位患者的個人信息和評估數據收集和保存在電腦里,通過計算機生成的隨機數字表,并由 1 名副主任醫師從一個密封的信封中隨機抽取數字,以 1∶1 的比例隨機分為 2 組;由 1 名不知曉分組以及不參與研究的醫師對患者進行觀察指標評估。
1.5 質量控制
① 試驗前制定質量控制標準,相關人員進行培訓;② 收集病例嚴格按照納排除及脫落標準并簽署知情同意書;③ 減少不良事件發生;④ 研究的質量把控,由醫院科技處和藥物臨床試驗管理部門進行監管。
1.6 統計學方法
采用 SPSS 25.0 統計軟件對數據進行分析。符合正態分布的計量資料采用均數±標準差表示,組間比較采用獨立樣本 t 檢驗;非正態分布的計量資料采用中位數(下四分位數,上四分位數)表示,組間比較 Wilcoxon 秩和檢驗。計數資料采用例數和百分比表示,組間比較采用 Pearson χ2 檢驗。正態分布計量資料的效應量采用均數差,偏態分布計量資料的效應量采用中位數差,并計算均數差和中位數差的 95%置信區間(confidence interval, CI)。雙側檢驗水準α=0.05。
2 結果
2.1 一般情況
共納入患者 60 例。其中,機器人組 28 例,徒手組 32 例。機器人組與徒手組在男女例數[17/11例vs.16/16例;χ2=0.693,P=0.567]、體質量指數[(64.9±9.95)vs.(63.3±8.49)kg/m2;t=0.721,P=0.505]比較,差異均無統計學意義。
2.2 兩組患者手術前后 VAS 評分比較
兩組患者手術前后 VAS 評分比較見表1。可見,機器人組術后第 3 天 VAS 評分優于徒手組(P=0.003)。
2.3 術中觀察指標
兩組患者術中觀察指標比較見表2。可見,除術中出血量、術中輻射次數外(P>0.05),機器人組的手術時間、平均植釘時間、術中輻射劑量均低于徒手組(P<0.05)。
2.4 兩組患者植釘準確率及小關節侵犯率比較
兩組患者兩組患者植釘準確率及小關節侵犯率比較見表3。可見,機器人組共植入椎弓根螺釘 166 枚,其中優秀(A 級)157 枚(94.6%),可接受(A 級+B 級)160 枚(96.4%);徒手組共植入椎弓根螺釘 192 枚,其中優秀(A 級)163 枚(84.9%),可接受(A 級+B 級)175 枚(91.1%)。機器人組植釘準確優秀率高于徒手組(χ2=7.806,P=0.005);兩組植釘準確可接受率比較,差異無統計學意義(χ2=3.240,P=0.072)。機器人組螺釘小關節侵犯率為 7.2%(12/166),徒手組為 14.1%(27/192),兩組比較差異無統計學意義(χ2=3.608,P=0.058)。
2.5 術后并發癥
術后末次隨訪時行 X 線及 CT 檢查均未發現螺釘松動及翻修病例。所有患者均未遺留神經癥狀。
3 討論
脊柱骨折占全身骨折的 5%~6%,其中胸腰段是脊柱胸彎和腰彎的移行區,應力匯聚、生物力學薄弱處,此節段骨折最為常見[16]。本病治療主要目的是恢復脊柱原有的結構及其穩定性[17]。傳統切開復位椎弓根螺釘內固定可良好復位骨折椎體,術后即刻維持脊柱的三柱穩定性,一直被認為是治療無神經癥狀非骨質疏松性胸腰椎骨折的“金標準”[18]。但存在軟組織干擾大、出血多、感染風險較高等弊端,且部分患者術后會出現腰背部脹痛等臨床癥狀[19]。而隨著脊柱微創技術的發展,多個文獻證明經皮微創椎弓根螺釘內固定是治療包括胸腰椎骨折在內的多種脊柱疾病準確、可靠且安全的方法[20-21]。有研究表明經皮微創椎弓根螺釘內固定治療胸腰段椎體骨折不僅減少了出血風險、軟組織損傷且減輕患者術后疼痛[22]。然而,Babu 等[15]報道了經皮放置椎弓根螺釘與使用開放螺釘相比,關節突關節的侵犯率更高。Patel 等[23]進行的一項尸體研究結果顯示,經皮穿刺植入椎弓根螺釘可導致 58%的小關節破壞率,此外他們認為侵犯關節囊或小關節后撞擊和不穩定是導致術后疼痛的原因之一[24]。因此,在脊柱經皮微創植釘的基礎上如何有效提高植釘準確性以及減少關節突關節侵犯率將是有效提高醫療質量的重要一環。
大量文獻報道了包括 Renaissance 機器人[25]、ExcelsiusGPS 機器人[26]、Mazor 機器人[27]、天璣機器人[28]等導航系統在椎弓根螺釘植釘的多個方面均優于徒手置釘,可見機器人在未來脊柱外科手術方面應用前景巨大。相較于其他類型機器人而言,PSIS-A 型骨科機器人是國內唯一使用直觀定位,也是全球唯一支持局部麻醉下手術的骨科機器人。該機器人依據術前 CT 數據設計釘道位置,術中無需有創標記、三維掃描,通過直觀圖像數據,以雙圓環瞄準方式,充分展示定位通道與椎弓根輪廓相對位置,方便術者及時發現和糾正手術路徑偏移。這種直觀展示方法同時避免了術中掃描、配準等操作環節,減少精度損失,一定程度上提高了植釘精度。但在使用過程中,本研究團隊發現由于缺少實時追蹤,當完成釘道確認后,需要在患者發生移動前,盡快完成穿刺操作,避免發生錯位;亦推測在患者皮膚表面增加追蹤標記可避免此類問題發生。
本研究團隊發現,相較于徒手植入椎弓根螺釘,機器人植釘優秀率明顯更高(P<0.05);徒手組螺釘的可接受率為 91.1%,PSIS-A 型機器人的植釘可接受率為 96.4%,明顯優于徒手植釘。這同以往有關機器人的研究內容一致[11-13]。同時一篇 Meta 分析也報道了相同的結果[29]。本研究結果分析徒手植釘準確率較低可能和僅依靠術中透視定位,其植釘進針點和進針方向不夠準確有關,同時與手術床固定不可靠、術中牽拉軟組織,使體位發生變化、呼吸因素等也有關[25]。而在 Hou 等[25]的研究結果中,機器人輔助技術椎弓根螺釘植入的準確率方面相較于徒手植釘并未見明顯優勢。分析這可能和樣本量、研究對象(脊柱側彎矯形)、椎弓根發育差異等多方面原因有關。在小關節突關節侵犯率方面,徒手植釘為 14.1%,機器人輔助植釘為 7.2%,可見機器人優勢明顯。術后第 3 天兩組間存在明顯差異(P<0.001)。這和 Patel 等[23]關于關節囊或小關節侵犯后撞擊和不穩是術后疼痛的誘因之一的結論相符。同時,本研究發現機器人輔助植釘在縮短手術時間、減少術中輻射等方面均有著明顯當然優勢,Fan 等[30]在比較脊柱外科多種引導技術中椎弓根螺釘植入的準確性中也發現機器人輔助技術能顯著減少不良事件、每顆螺釘透視時間。然而雖然機器人輔助植釘相較于徒手植釘能夠節省手術時間,但在本研究團隊早期手術病例中卻有著截然相反的結果,往往是機器人輔助手術更為耗時,這種現象在手術病例累計 10 余例以后才逐步改善。由此可見,即使是經驗豐富的高年資脊柱外科醫生,依舊需要經過一定的學習曲線,才能夠發揮出機器人的優勢。通過本研究可認為 PSIS-A 型機器人雖然沒有術中實時監測功能,但其在經皮椎弓根螺釘植入手術中相較于傳統徒手植釘依然有著顯著的優勢,具有巨大的臨床應用前景。
本研究也存在一定的缺陷。首先,本研究只比較了機器人與徒手植釘的情況,并不清楚該機器人與市面上其他類型機器人比較孰強孰弱;其次,雖然本研究顯示機器人在植釘準確率以及小關節侵犯率上均較徒手植釘有著明顯的優勢,但同其他機器人一樣,依然存在著植釘飄移現象。Du 等[31]的研究認為機器人是將術前 CT 和術中透視圖像相匹配,再根據術前 CT 數據規劃椎弓根螺釘軌跡,如果術中患者體位與術前 CT 掃描時不一致,可能會降低植入的準確性。同時,術中患者呼吸、手術牽拉等也會造成一定影響;因此,如何在現有機器人技術基礎上進一步提高植釘準確率及小關節侵犯率,避免術中植釘過程中螺釘偏移現象的發生將時我們接下來研究的重點。
綜上所述,PSIS-A 型機器人輔助經皮微創椎弓根螺釘內固定術治療胸腰椎骨折相較于徒手經皮微創椎弓根螺釘植入術可取的更好的臨床療效。并且能夠提高螺釘植入準確率,降低小關節侵犯率,縮短手術時間,減少患者術中輻射劑量,值得臨床進一步推廣應用。
利益沖突:所有作者聲明不存在利益沖突。
