引用本文: 劉昕, 鄧佳燕, 申丹偉, 林旭, 胡海剛, 吳超. 基于深度學習的人工智能算法在寰椎椎弓根螺釘自動規劃中的可行性研究. 華西醫學, 2024, 39(10): 1531-1536. doi: 10.7507/1002-0179.202408139 復制
版權信息: ?四川大學華西醫院華西期刊社《華西醫學》版權所有,未經授權不得轉載、改編
目前,寰椎椎弓根螺釘在抗拔性和三維穩定性方面具有明顯優勢,已成為寰椎后路內固定的首選方式[1]。精準的寰椎椎弓根螺釘置入成為頸椎內固定手術的關鍵。雖然寰椎椎弓根螺釘內傾角度 20°有最寬的椎弓根通道[2-3],然而,內傾角越大往往意味著更大的切口和更大的軟組織張力,從而導致內傾角不好把控而突破椎弓根內側皮質[4-5]。有學者在干燥標本上測量發現 92%的寰椎都能置入平行于矢狀面的椎弓根螺釘[6];也有學者通過大樣本量的寰椎數字化三維重建模型測量,也獲得了相似的結論,并通過了臨床驗證[7-8],然而數字化模擬和設計過程需要投入大量的學習時間和精力。隨著人工智能(artificial intelligence, AI)技術的發展,其在骨科手術規劃領域的研究不斷深入,為骨科手術帶來了巨大變革。AI 模型可識別腰椎最優椎弓根螺釘通道,并能獲得具有更高骨密度和更高抗拔出力的椎弓根螺釘通道[9],且 AI 相關算法也可為螺釘長度、直徑的選擇以及螺釘置入的精準性和安全性提供重要參考價值,其完全不突破皮質的比例顯著高于徒手置釘[10]。
雖然 AI 在腰椎椎弓根螺釘規劃中有一定研究基礎,但很少關于采用 AI 算法對寰椎椎弓根螺釘路徑自動規劃的研究。因此,本研究基于寰椎解剖特征,選取前結節、后結節、雙側椎弓根內邊緣作為空間關鍵點,利用熱力圖算法對其空間位置分布進行訓練,獲得空間關鍵點分布圖,通過空間關鍵點與平行于矢狀面的椎弓根的幾何關系,實現寰椎椎弓根螺釘路徑自動規劃,以期為后續骨科手術機器人自動規劃手術奠定理論和技術基礎。
1 對象與方法
1.1 研究對象
回顧性選取 2021 年 4 月—2023 年 12 月在自貢市第四人民醫院健康管理中心完成頸椎 CT 掃描人群的 CT 數據。納入標準:年齡≥18 周歲;影像數據完整。排除標準:寰椎椎弓根直徑<3.5 mm;先天性畸形;病理性骨折以及嚴重骨質疏松;頸椎發育畸形無法置入椎弓根螺釘者;存在非病理性骨折、滑脫或其他嚴重內科疾病。本研究已通過自貢市第四人民醫院倫理委員會審查(倫理審查2021-014號)。
根據以往經驗,設計訓練樣本量從 100 逐步增加至 400,達到訓練結果的穩定性和防止過擬合,訓練 1 000 輪,關鍵點訓練準確率穩定達到 98%以上即確保了穩定性,驗證組數據即可防止過擬合,80%作為訓練集,20%作為驗證集。
1.2 研究方法
1.2.1 分組
采用隨機數字表法將納入人群數據中的 20%納入驗證組,剩余 80%納入訓練組。
1.2.2 影像數據獲取與搜集
通過影像數據共享系統,獲取寰椎的原始 CT 數據。CT 掃描參數如下:電壓 120 kV,電流 185.25 mAs,視野 17.3 cm×17.3 cm,矩陣 512×512 像素,層厚 0.625 mm,圖像保存為 DICOM 格式。
將上述 DICOM 格式的圖像導入 ITK-SNAP[賓夕法尼亞大學賓州圖像計算與科學實驗室(PICSL)的 PaulYushkevich 博士和猶他大學科學計算與成像研究所(SC)的 Guido Gerig 博士共同開發]開源軟件,將其輸出到指定文件路徑,輸出圖像格式為.nii,用于訓練中的圖像體素標定。
1.2.3 寰椎的三維建模
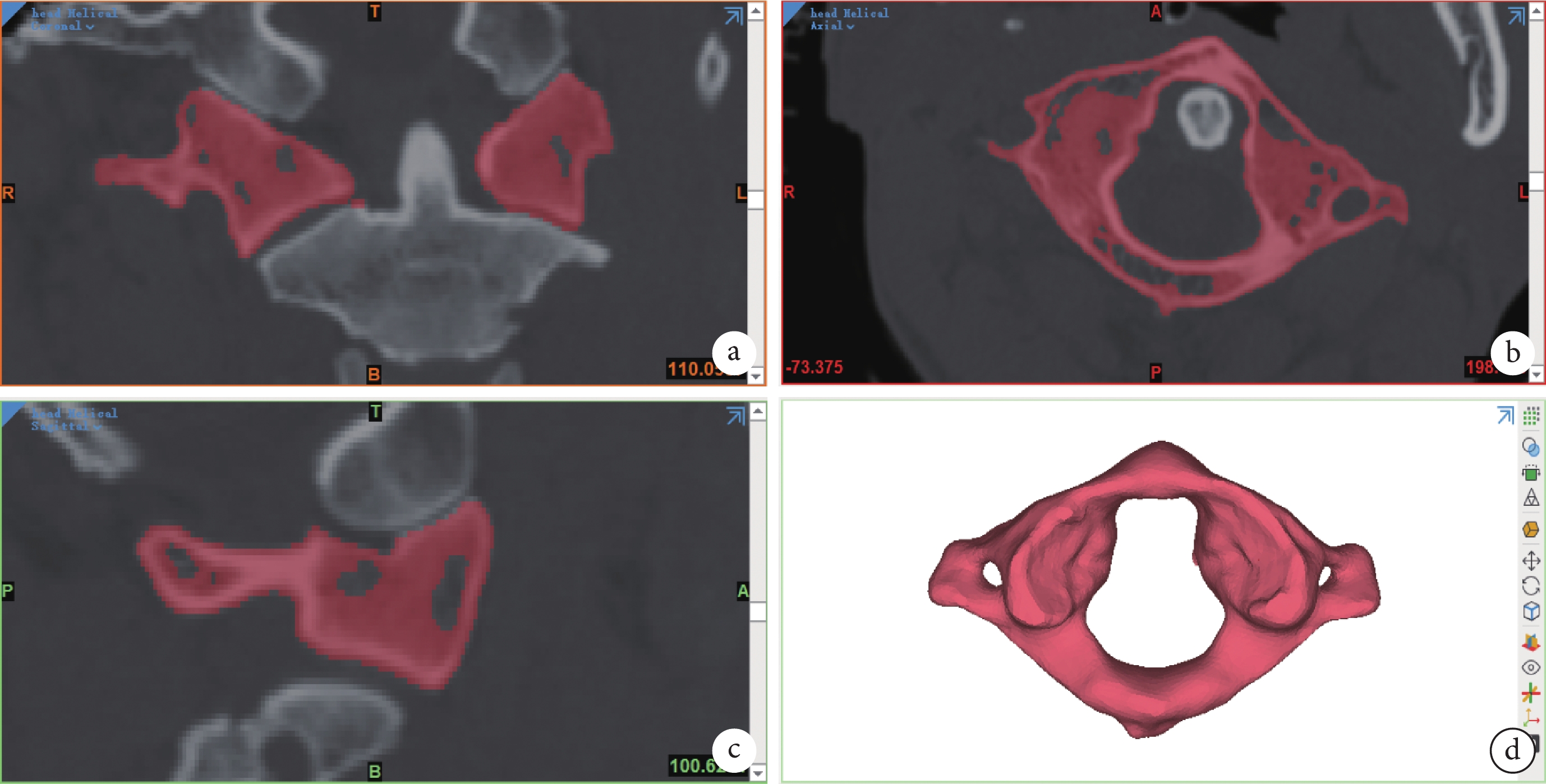
將訓練組的 CT 數據導入 Mimics 23.0(比利時 Materialise),三維建模步驟如下(圖1):第一步,根據被試者骨質分布情況,選取骨骼閾值,獲取椎體的二維蒙版;第二步,利用蒙版分割功能,將寰椎蒙版分割成獨立蒙版;第三步,設置平滑參數,將寰椎的二維蒙版進行三維重建,獲得寰椎的三維模型;第四步,將寰椎的三維模型導出到指定文件路徑,用于訓練中的模型邊界計算,導出格式為 STL。
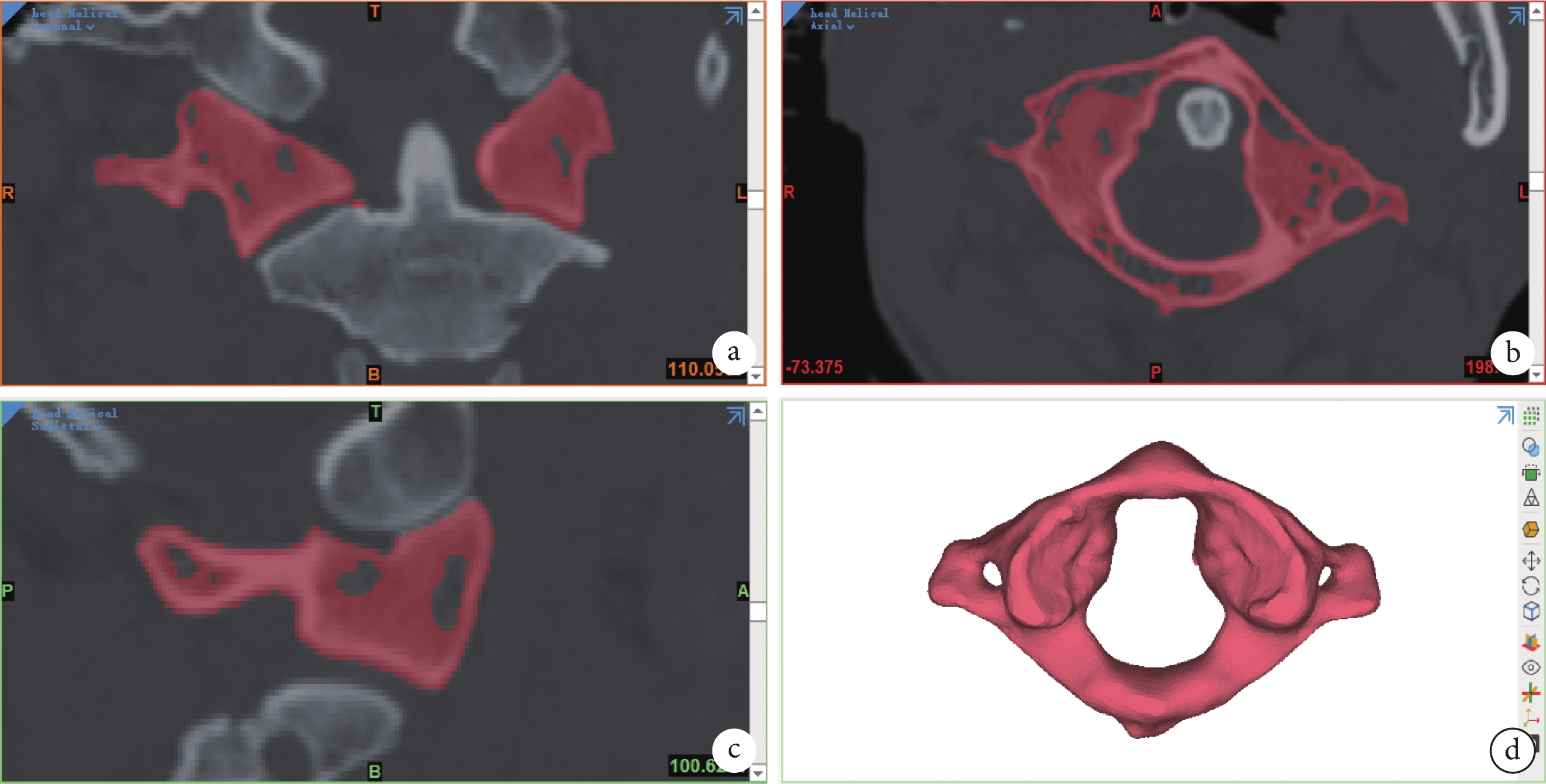 圖1
提取患者的寰椎蒙版并進行三維建模彩色像
圖1
提取患者的寰椎蒙版并進行三維建模彩色像
a. 提取環椎蒙版(冠狀面);b. 提取環椎蒙版(橫斷面);c. 提取環椎蒙版(矢狀面);d. 環椎的三維重建
1.2.4 空間關鍵點標記
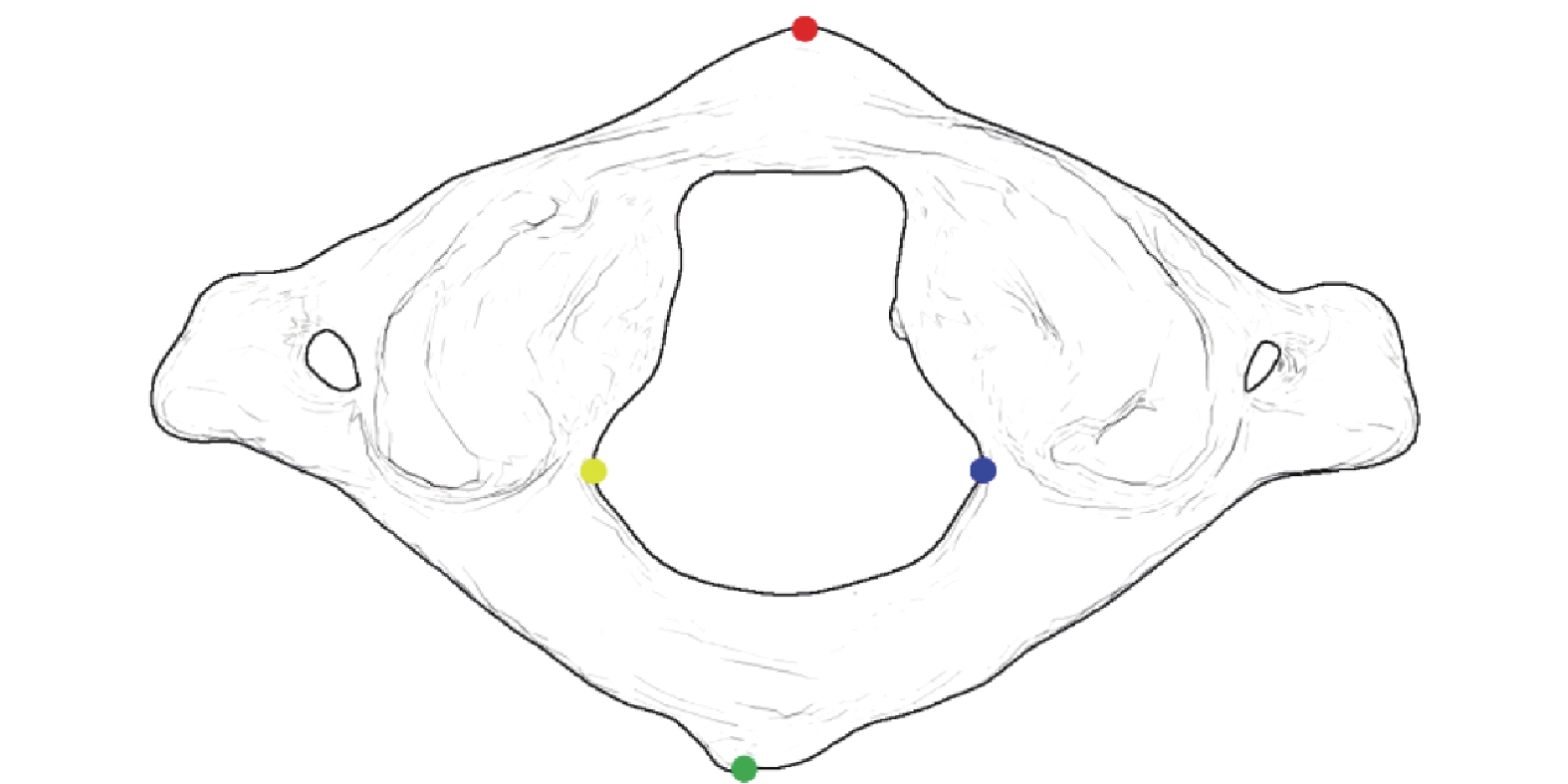
將訓練組 DICOM 格式的圖像導入 ITK-SNAP 軟件,將關鍵點標記設置為1 個體素(三維坐標中的像素點),分別以紅色小圓點(標記點 1)、綠色(標記點 2)、藍色(標記點 3)和黃色(標記點 4)的體素分別標記寰椎前結節、寰椎后結節、寰椎右側椎弓根內邊緣和左側椎弓根內邊緣。寰椎橫斷面觀空間標記點示意圖見圖2~4。
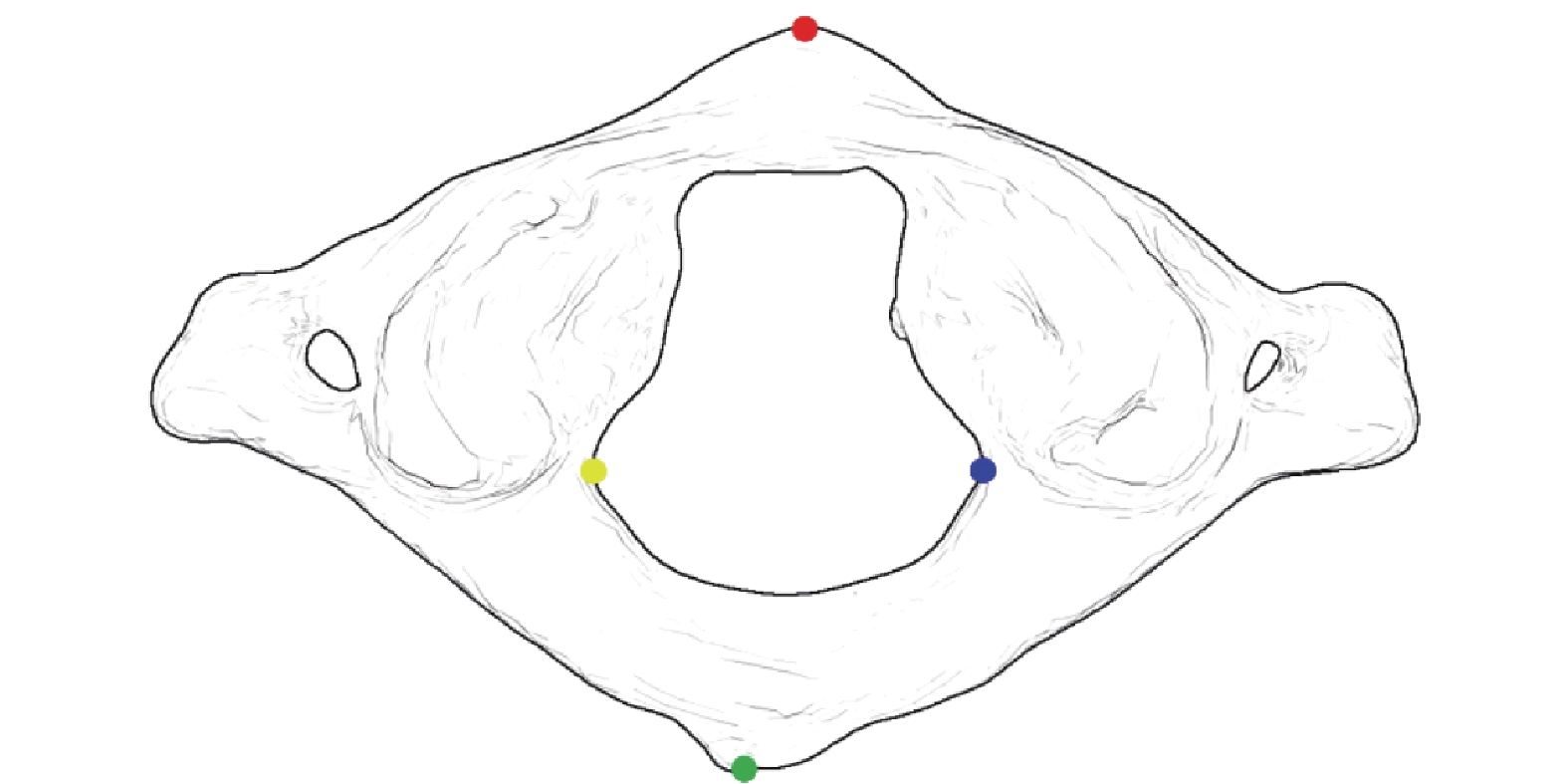 圖2
寰椎橫斷面觀空間標記點示意圖
圖2
寰椎橫斷面觀空間標記點示意圖
紅色小圓點表示寰椎前結節,綠色小紅點表示寰椎后結節,藍色小圓點表示寰椎右側椎弓根內邊緣,黃色小圓點表示環椎左側椎弓根內邊緣
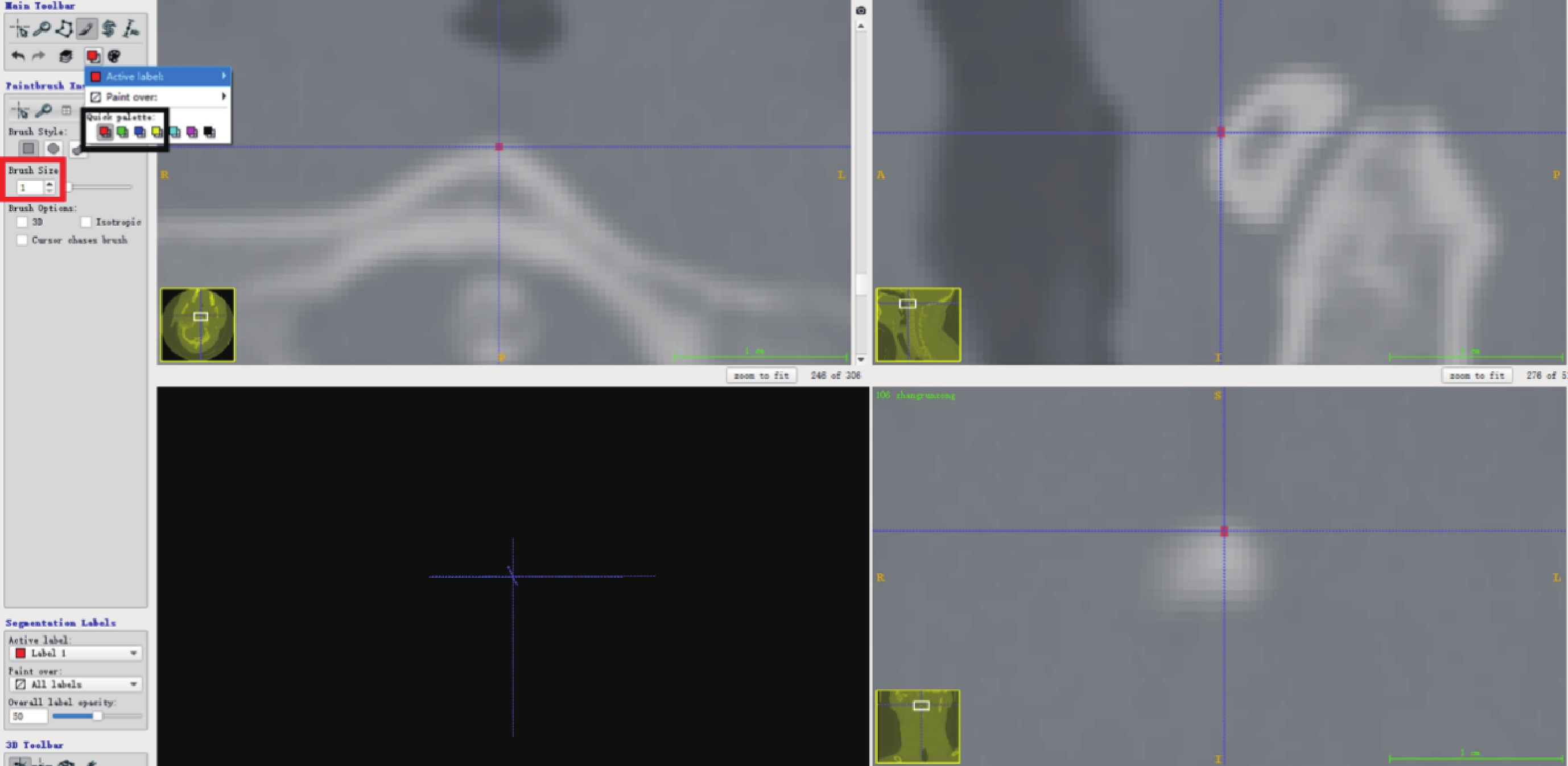
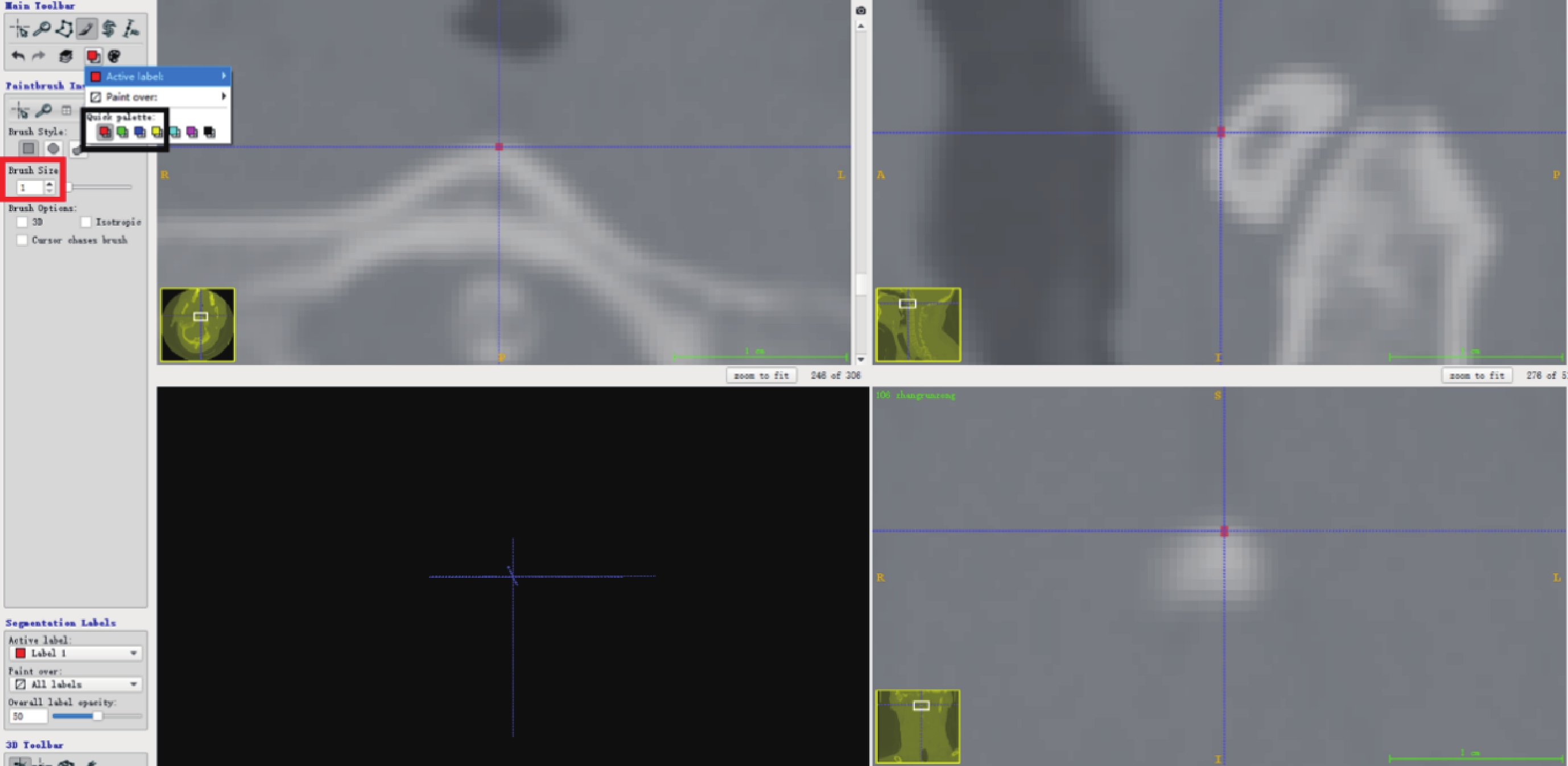 圖3
關鍵點標注
圖3
關鍵點標注
在 ITK-SNAP 軟件中對 4 個空間關鍵點標記,紅框表示體素值設置為“1”,黑框表示 4 個空間關鍵點的顏色分別設置為紅色、綠色、藍色和黃色
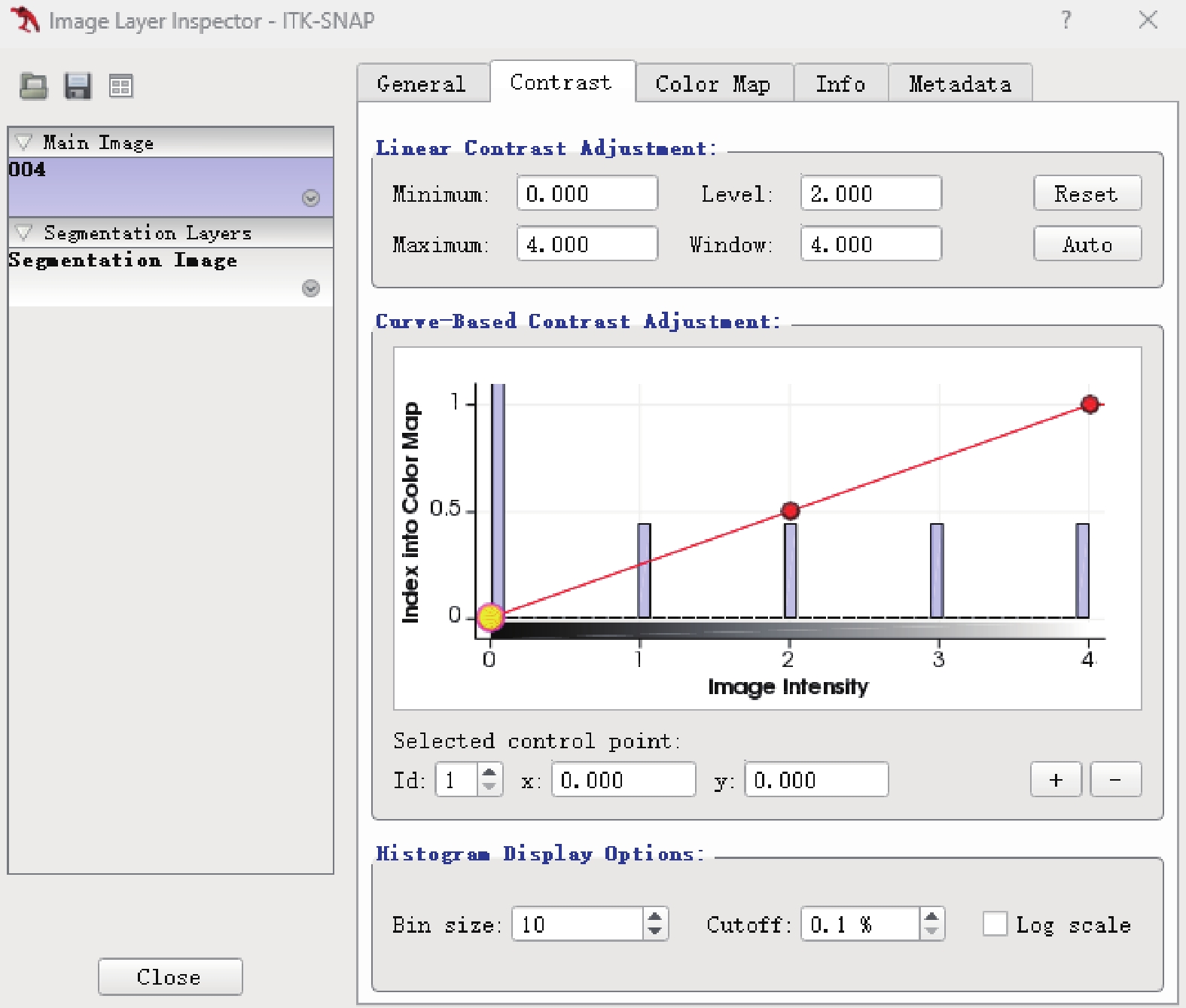
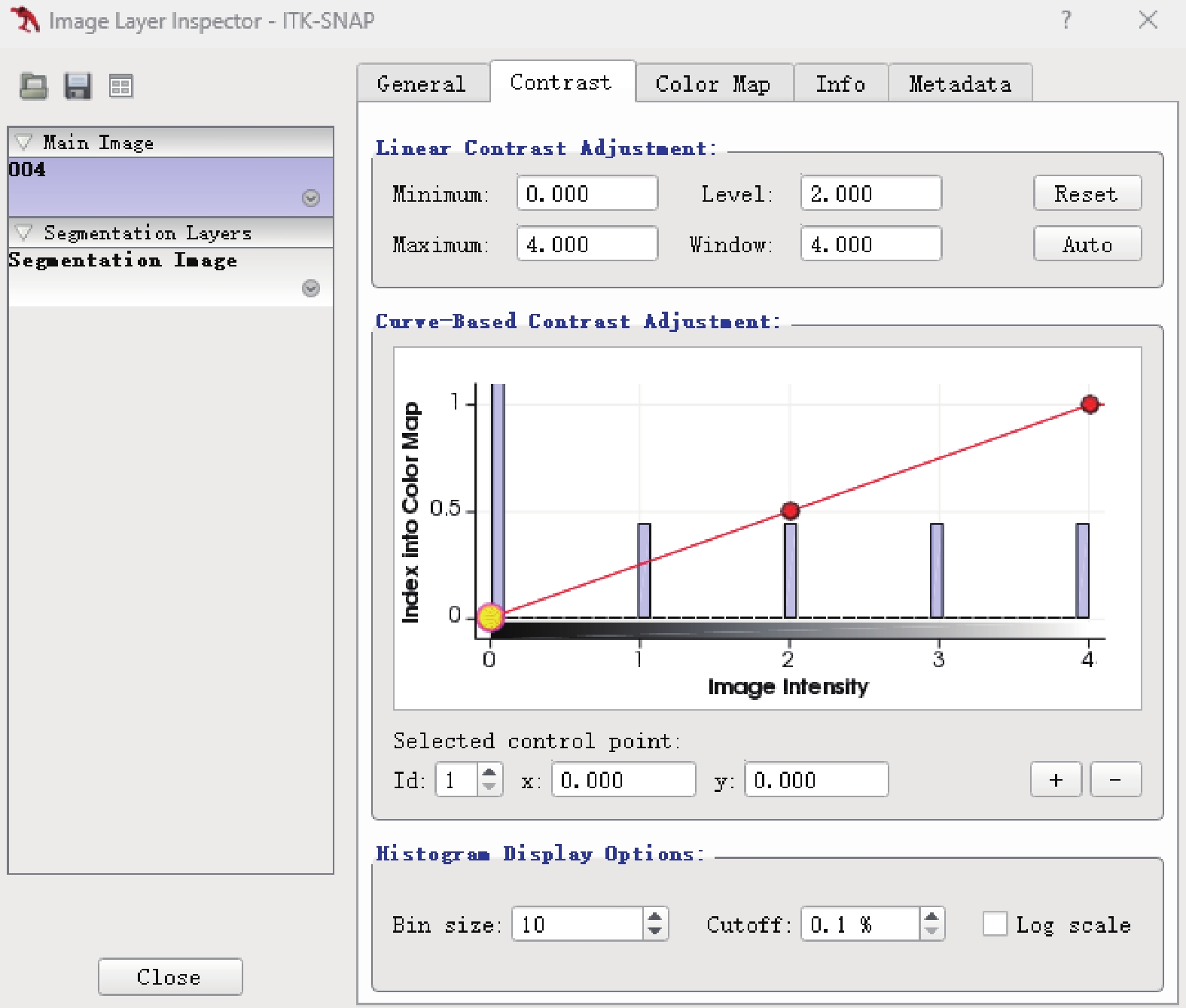 圖4
4 個標記點驗證
圖4
4 個標記點驗證
4 個空間關鍵點體素分布均勻
1.2.5 驗證組觀察指標
① 空間關鍵點定位誤差:評估訓練模型輸出的 4 個關鍵點坐標位置與實際標記點的坐標偏差。② 置釘安全性:觀察 AI 置入的椎弓根螺釘是否突破椎弓根皮質。③ 椎弓根螺釘中心線與椎弓根內邊緣平均距離:即評估螺釘和椎弓根內邊緣的距離與根據以往經驗設置的 2.75 mm 的偏差。如偏差不超過1 mm,判定較為安全。
1.3 深度學習訓練和算法驗證
1.3.1 訓練組訓練過程
共包括 6 個步驟:① 數據預處理。加載.nii 格式的原始頸椎圖像,將圖像重采樣到統一的體素尺寸,確保訓練數據的一致性。加載.nii 格式的空間關鍵點標記圖像,根據預定義的參數或 ROI 裁剪圖像和標記。加載 STL 格式的頸椎三維模型文件,用于計算每個 STL 文件的空間邊界。加載 STL 格式的頸椎三維模型文件和.nii 格式的原始頸椎圖像,用于驗證 STL 文件的邊界是否與相應的.nii 圖像匹配。② 數據加載和增強。加載已處理(裁剪和/或重采樣)的.nii 格式的原始頸椎圖像和空間關鍵點標記圖像,創建用于訓練的數據集,包括數據增強。③ 定義模型結構和損失函數。定義用于空間關鍵點檢測或其他任務的神經網絡模型,實現對外部環境提供的模式樣本進行學習訓練,同時能自動提取外部環境變化特征,對模式樣本進行訓練。定義用于訓練過程中評價模型輸出與目標標簽差異的損失函數,計算模型預測值與真實值之間的差異,?為模型的訓練和優化提供方向。④ 訓練模型。對上述步驟處理后的.nii 格式的原始頸椎圖像和空間關鍵點標記圖像,執行模型的訓練和驗證,調整模型參數。⑤ 模型部署準備。加載訓練好的 PyTorch 模型文件,將 PyTorch 模型轉換為 TorchScript 格式,以便部署。⑥ 可選的展示和驗證。加載裁剪后的.nii 格式醫學圖像,顯示圖像以驗證裁剪效果。
1.3.2 驗證過程
將訓練后的模型文件加載到 Visual Studio 2022,提取空間關鍵點的熱力圖分布,根據本研究小組前期經驗設置平行于矢狀面的寰椎椎弓根螺釘路徑的約束規則:① 平行于標記點 1 和標記點 2 連線;② 右側椎弓根螺釘中心線與標記點 3 距離為 2.75 mm;③ 左側椎弓根螺釘中心線與標記點 4 距離為 2.75 mm;④ 選取滿足以上條件的最長椎弓根螺釘為最佳。
程序編譯后,獲取寰椎平行于矢狀面的椎弓根螺釘自動規劃的可視化界面。將驗證組頸椎 CT 原始數據導入,獲得寰椎平行于矢狀面的椎弓根螺釘自動規劃結果。深度學習算法實現示意圖見圖5。
 圖5
深度學習算法實現示意圖
圖5
深度學習算法實現示意圖
1.4 數據篩選
掃描范圍全部覆蓋環椎。剔除骨折和環椎畸形數據。
1.5 質量控制
參考以往經驗,將空間標記點訓練準確率(accuracy, ACC)控制在 98%以上。
1.6 統計學方法
采用 SPSS 23.0 統計軟件進行數據分析。計量資料采用均數±標準差表示。計數資料采用例數和百分比表示。
2 結果
2.1 訓練樣本確認
共納入患者 500 例,年齡 18~76 歲,體質量指數 19.4~26.3 kg/m2。訓練組 400 例,驗證組100 例。
2.2 關鍵點定位準確性和置釘安全性評估
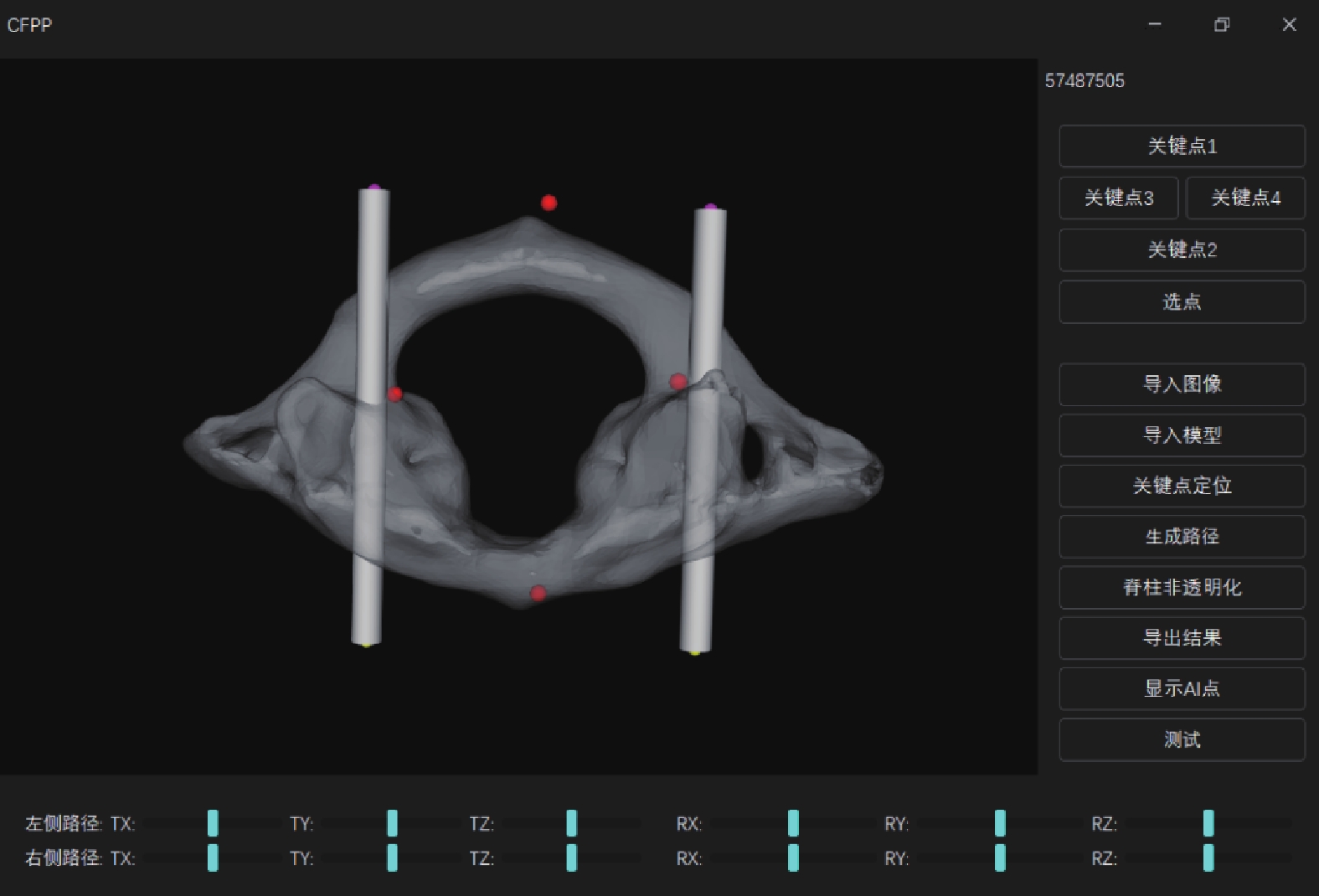
訓練組共納入寰椎 400 個,訓練節段 400 個,ACC 為 98.62%。驗證組共納入寰椎 100 個,ACC 為 98.62%。將驗證組的數據導入編譯程序,獲得寰椎平行于矢狀面椎弓根螺釘路徑。驗證組中 4 個空間關鍵點的平均定位誤差為(0.47±0.16)mm,100 個寰椎椎弓根規劃路徑均位于椎弓根內,沒有突破椎弓根皮質,左右兩側規劃路徑均平行,置釘安全率 100%。規劃的椎弓根螺釘中心線與椎弓根內邊緣平均距離為(2.86±0.12)mm。關鍵點定位和置釘示意圖見圖6。
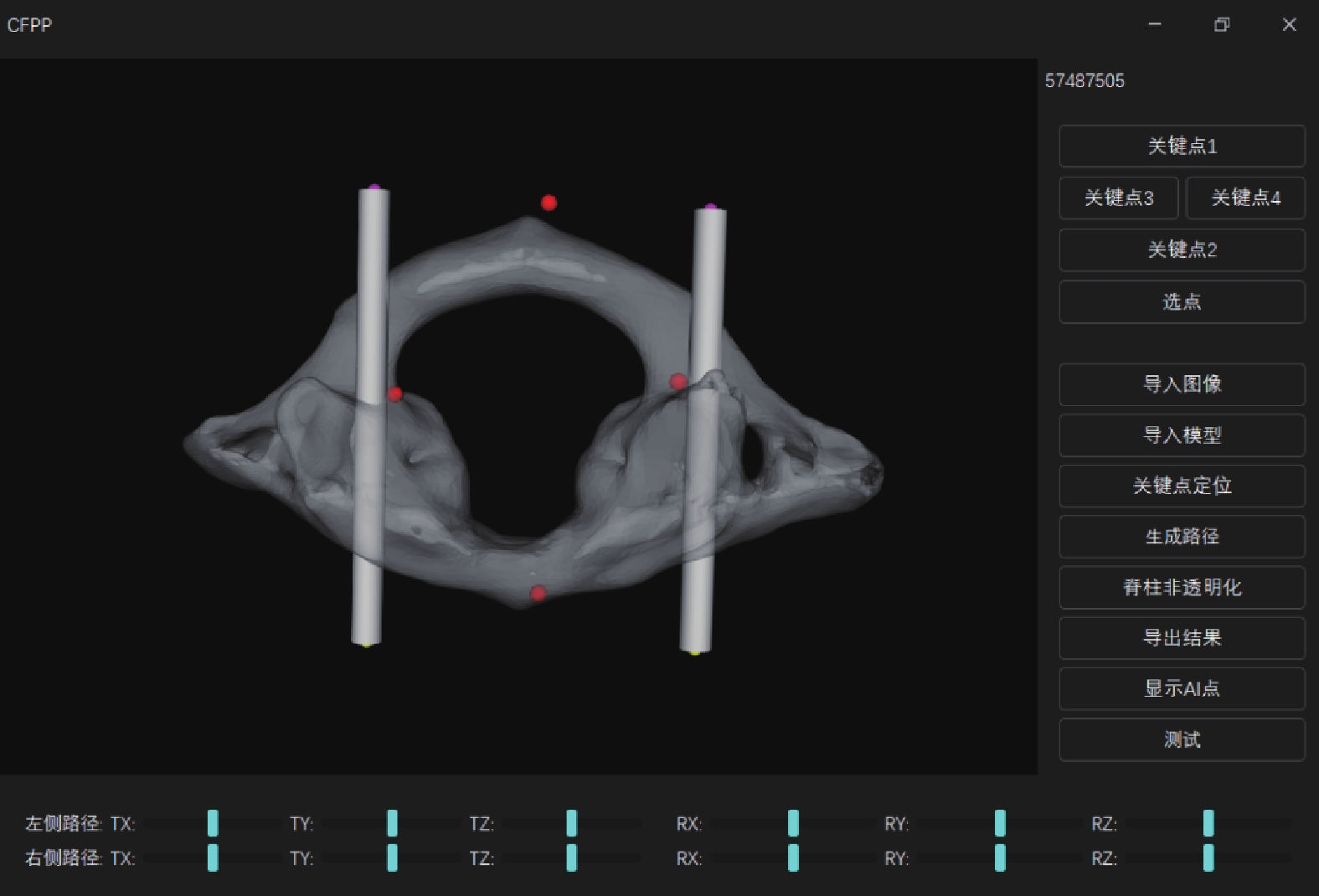 圖6
關鍵點定位和置釘示意圖
圖6
關鍵點定位和置釘示意圖
3 討論
3.1 寰椎平行于矢狀面置入椎弓根螺釘的解剖優勢
由于寰椎椎弓根螺釘在手術時間、出血量和力學穩定性上均優于側塊螺釘,一度成為上頸椎內固定術的首選方式[1-2],但寰椎椎弓根螺釘置入成功與否受椎弓根寬度和高度影響,由于寰椎椎弓根解剖變化大,常規置釘方式存在較大的手術難度和風險[11],對于椎弓根高度<3.5 mm 的患者,需要調整頭傾角才能將螺釘安全放置,較大的頭傾角和較大的內傾角不僅擴大手術切口,更增加軟組織張力,使螺釘安全置入的難度加大[12-13],而平行于矢狀面的椎弓根螺釘能避免來自雙側的軟組織張力,且適用于大多數椎弓根結構。現將寰椎平行于矢狀面置入椎弓根螺釘的優勢總結如下:① 大量的解剖學測量證實了寰椎平行于矢狀面置入椎弓根螺釘是可行的;② 平行于寰椎矢狀面的椎弓根螺釘進釘點靠近內側,減少了寰椎內弓暴露和椎動脈損傷的風險;③ 軟組織張力較小,螺釘方向不受軟組織張力影響,螺釘方向的準確性更好。
3.2 AI 算法在寰椎椎弓根螺釘置入中的安全性
智能化和精準化是現在醫學發展的重要方向和研究熱點,目前的骨科手術機器人均為術中實時采集三維 C 臂影像,術中人工規劃螺釘路徑,手術時間長,規劃準確性主觀因素大。骨科機器人中的系列全自動或半自動手術均基于 AI 自動規劃,如骨骼精準切割,內置物精準固定,腫瘤切除、穿刺等臨床手術[14-17],相對于傳統手術方式,基于 AI 技術的全自動或半自動規劃可提高手術效率,降低手術風險。然而,對于寰椎椎弓根置釘的 AI 自動規劃的報道極為少見,由于本研究團隊前期做了大量解剖學測量和臨床手術驗證,證實了平行于矢狀面的寰椎椎弓根螺釘置入的可行性。因此,本研究將 4 個重要空間關鍵點作為特征點,訓練 400 例不同解剖結構的寰椎模型,關鍵點定位準確率達到 98.62%;在 100 例寰椎模型中獲得驗證,100 例寰椎模型中平行于矢狀面的椎弓根螺釘均未突破皮質,安全率達到 100%,椎弓根螺釘中心線與椎弓根內邊緣距離與設置值的平均偏差 0.11 mm,獲得了較好的訓練效果,這不僅簡化了寰椎椎弓根螺釘內固定的術前模擬過程,也提高了置釘的安全性,為后期骨科機器人的寰椎椎弓根螺釘自動置入的手術模塊開發奠定了基礎。
3.3 大樣本量的 AI 訓練算法的應用前景
AI算法的穩定性和魯棒性好壞很大程度上受訓練樣本量影響,因此,寰椎模型庫應該涵蓋所有寰椎椎弓根形態,才能保證訓練模型的廣泛適用性[18]。本研究納入 400 例正常人體的寰椎模型,涵蓋了不同性別、不同年齡段、不同身高、不同體重以及不同體型的寰椎模型(為單中心研究),經計算,其空間關鍵點的平均定位誤差為 (0.47±0.16)mm,置釘平均偏差僅為 0.11 mm,完全滿足寰椎椎弓根置釘安全性需求;后期健康管理中心將持續擴大訓練樣本,進一步優化算法穩定性和魯棒性。
綜上所述,基于深度學習的AI算法,本研究小組建立了以寰椎前、后結節和雙側椎弓根內邊緣為空間關鍵點的平行于矢狀面的椎弓根通道優化模型,通過驗證發現其誤差較小,應用前景廣闊。
利益沖突:所有作者聲明不存在利益沖突。
目前,寰椎椎弓根螺釘在抗拔性和三維穩定性方面具有明顯優勢,已成為寰椎后路內固定的首選方式[1]。精準的寰椎椎弓根螺釘置入成為頸椎內固定手術的關鍵。雖然寰椎椎弓根螺釘內傾角度 20°有最寬的椎弓根通道[2-3],然而,內傾角越大往往意味著更大的切口和更大的軟組織張力,從而導致內傾角不好把控而突破椎弓根內側皮質[4-5]。有學者在干燥標本上測量發現 92%的寰椎都能置入平行于矢狀面的椎弓根螺釘[6];也有學者通過大樣本量的寰椎數字化三維重建模型測量,也獲得了相似的結論,并通過了臨床驗證[7-8],然而數字化模擬和設計過程需要投入大量的學習時間和精力。隨著人工智能(artificial intelligence, AI)技術的發展,其在骨科手術規劃領域的研究不斷深入,為骨科手術帶來了巨大變革。AI 模型可識別腰椎最優椎弓根螺釘通道,并能獲得具有更高骨密度和更高抗拔出力的椎弓根螺釘通道[9],且 AI 相關算法也可為螺釘長度、直徑的選擇以及螺釘置入的精準性和安全性提供重要參考價值,其完全不突破皮質的比例顯著高于徒手置釘[10]。
雖然 AI 在腰椎椎弓根螺釘規劃中有一定研究基礎,但很少關于采用 AI 算法對寰椎椎弓根螺釘路徑自動規劃的研究。因此,本研究基于寰椎解剖特征,選取前結節、后結節、雙側椎弓根內邊緣作為空間關鍵點,利用熱力圖算法對其空間位置分布進行訓練,獲得空間關鍵點分布圖,通過空間關鍵點與平行于矢狀面的椎弓根的幾何關系,實現寰椎椎弓根螺釘路徑自動規劃,以期為后續骨科手術機器人自動規劃手術奠定理論和技術基礎。
1 對象與方法
1.1 研究對象
回顧性選取 2021 年 4 月—2023 年 12 月在自貢市第四人民醫院健康管理中心完成頸椎 CT 掃描人群的 CT 數據。納入標準:年齡≥18 周歲;影像數據完整。排除標準:寰椎椎弓根直徑<3.5 mm;先天性畸形;病理性骨折以及嚴重骨質疏松;頸椎發育畸形無法置入椎弓根螺釘者;存在非病理性骨折、滑脫或其他嚴重內科疾病。本研究已通過自貢市第四人民醫院倫理委員會審查(倫理審查2021-014號)。
根據以往經驗,設計訓練樣本量從 100 逐步增加至 400,達到訓練結果的穩定性和防止過擬合,訓練 1 000 輪,關鍵點訓練準確率穩定達到 98%以上即確保了穩定性,驗證組數據即可防止過擬合,80%作為訓練集,20%作為驗證集。
1.2 研究方法
1.2.1 分組
采用隨機數字表法將納入人群數據中的 20%納入驗證組,剩余 80%納入訓練組。
1.2.2 影像數據獲取與搜集
通過影像數據共享系統,獲取寰椎的原始 CT 數據。CT 掃描參數如下:電壓 120 kV,電流 185.25 mAs,視野 17.3 cm×17.3 cm,矩陣 512×512 像素,層厚 0.625 mm,圖像保存為 DICOM 格式。
將上述 DICOM 格式的圖像導入 ITK-SNAP[賓夕法尼亞大學賓州圖像計算與科學實驗室(PICSL)的 PaulYushkevich 博士和猶他大學科學計算與成像研究所(SC)的 Guido Gerig 博士共同開發]開源軟件,將其輸出到指定文件路徑,輸出圖像格式為.nii,用于訓練中的圖像體素標定。
1.2.3 寰椎的三維建模
將訓練組的 CT 數據導入 Mimics 23.0(比利時 Materialise),三維建模步驟如下(圖1):第一步,根據被試者骨質分布情況,選取骨骼閾值,獲取椎體的二維蒙版;第二步,利用蒙版分割功能,將寰椎蒙版分割成獨立蒙版;第三步,設置平滑參數,將寰椎的二維蒙版進行三維重建,獲得寰椎的三維模型;第四步,將寰椎的三維模型導出到指定文件路徑,用于訓練中的模型邊界計算,導出格式為 STL。
圖1
提取患者的寰椎蒙版并進行三維建模彩色像
a. 提取環椎蒙版(冠狀面);b. 提取環椎蒙版(橫斷面);c. 提取環椎蒙版(矢狀面);d. 環椎的三維重建
1.2.4 空間關鍵點標記
將訓練組 DICOM 格式的圖像導入 ITK-SNAP 軟件,將關鍵點標記設置為1 個體素(三維坐標中的像素點),分別以紅色小圓點(標記點 1)、綠色(標記點 2)、藍色(標記點 3)和黃色(標記點 4)的體素分別標記寰椎前結節、寰椎后結節、寰椎右側椎弓根內邊緣和左側椎弓根內邊緣。寰椎橫斷面觀空間標記點示意圖見圖2~4。
圖2
寰椎橫斷面觀空間標記點示意圖
紅色小圓點表示寰椎前結節,綠色小紅點表示寰椎后結節,藍色小圓點表示寰椎右側椎弓根內邊緣,黃色小圓點表示環椎左側椎弓根內邊緣
圖3
關鍵點標注
在 ITK-SNAP 軟件中對 4 個空間關鍵點標記,紅框表示體素值設置為“1”,黑框表示 4 個空間關鍵點的顏色分別設置為紅色、綠色、藍色和黃色
圖4
4 個標記點驗證
4 個空間關鍵點體素分布均勻
1.2.5 驗證組觀察指標
① 空間關鍵點定位誤差:評估訓練模型輸出的 4 個關鍵點坐標位置與實際標記點的坐標偏差。② 置釘安全性:觀察 AI 置入的椎弓根螺釘是否突破椎弓根皮質。③ 椎弓根螺釘中心線與椎弓根內邊緣平均距離:即評估螺釘和椎弓根內邊緣的距離與根據以往經驗設置的 2.75 mm 的偏差。如偏差不超過1 mm,判定較為安全。
1.3 深度學習訓練和算法驗證
1.3.1 訓練組訓練過程
共包括 6 個步驟:① 數據預處理。加載.nii 格式的原始頸椎圖像,將圖像重采樣到統一的體素尺寸,確保訓練數據的一致性。加載.nii 格式的空間關鍵點標記圖像,根據預定義的參數或 ROI 裁剪圖像和標記。加載 STL 格式的頸椎三維模型文件,用于計算每個 STL 文件的空間邊界。加載 STL 格式的頸椎三維模型文件和.nii 格式的原始頸椎圖像,用于驗證 STL 文件的邊界是否與相應的.nii 圖像匹配。② 數據加載和增強。加載已處理(裁剪和/或重采樣)的.nii 格式的原始頸椎圖像和空間關鍵點標記圖像,創建用于訓練的數據集,包括數據增強。③ 定義模型結構和損失函數。定義用于空間關鍵點檢測或其他任務的神經網絡模型,實現對外部環境提供的模式樣本進行學習訓練,同時能自動提取外部環境變化特征,對模式樣本進行訓練。定義用于訓練過程中評價模型輸出與目標標簽差異的損失函數,計算模型預測值與真實值之間的差異,?為模型的訓練和優化提供方向。④ 訓練模型。對上述步驟處理后的.nii 格式的原始頸椎圖像和空間關鍵點標記圖像,執行模型的訓練和驗證,調整模型參數。⑤ 模型部署準備。加載訓練好的 PyTorch 模型文件,將 PyTorch 模型轉換為 TorchScript 格式,以便部署。⑥ 可選的展示和驗證。加載裁剪后的.nii 格式醫學圖像,顯示圖像以驗證裁剪效果。
1.3.2 驗證過程
將訓練后的模型文件加載到 Visual Studio 2022,提取空間關鍵點的熱力圖分布,根據本研究小組前期經驗設置平行于矢狀面的寰椎椎弓根螺釘路徑的約束規則:① 平行于標記點 1 和標記點 2 連線;② 右側椎弓根螺釘中心線與標記點 3 距離為 2.75 mm;③ 左側椎弓根螺釘中心線與標記點 4 距離為 2.75 mm;④ 選取滿足以上條件的最長椎弓根螺釘為最佳。
程序編譯后,獲取寰椎平行于矢狀面的椎弓根螺釘自動規劃的可視化界面。將驗證組頸椎 CT 原始數據導入,獲得寰椎平行于矢狀面的椎弓根螺釘自動規劃結果。深度學習算法實現示意圖見圖5。
圖5
深度學習算法實現示意圖
1.4 數據篩選
掃描范圍全部覆蓋環椎。剔除骨折和環椎畸形數據。
1.5 質量控制
參考以往經驗,將空間標記點訓練準確率(accuracy, ACC)控制在 98%以上。
1.6 統計學方法
采用 SPSS 23.0 統計軟件進行數據分析。計量資料采用均數±標準差表示。計數資料采用例數和百分比表示。
2 結果
2.1 訓練樣本確認
共納入患者 500 例,年齡 18~76 歲,體質量指數 19.4~26.3 kg/m2。訓練組 400 例,驗證組100 例。
2.2 關鍵點定位準確性和置釘安全性評估
訓練組共納入寰椎 400 個,訓練節段 400 個,ACC 為 98.62%。驗證組共納入寰椎 100 個,ACC 為 98.62%。將驗證組的數據導入編譯程序,獲得寰椎平行于矢狀面椎弓根螺釘路徑。驗證組中 4 個空間關鍵點的平均定位誤差為(0.47±0.16)mm,100 個寰椎椎弓根規劃路徑均位于椎弓根內,沒有突破椎弓根皮質,左右兩側規劃路徑均平行,置釘安全率 100%。規劃的椎弓根螺釘中心線與椎弓根內邊緣平均距離為(2.86±0.12)mm。關鍵點定位和置釘示意圖見圖6。
圖6
關鍵點定位和置釘示意圖
3 討論
3.1 寰椎平行于矢狀面置入椎弓根螺釘的解剖優勢
由于寰椎椎弓根螺釘在手術時間、出血量和力學穩定性上均優于側塊螺釘,一度成為上頸椎內固定術的首選方式[1-2],但寰椎椎弓根螺釘置入成功與否受椎弓根寬度和高度影響,由于寰椎椎弓根解剖變化大,常規置釘方式存在較大的手術難度和風險[11],對于椎弓根高度<3.5 mm 的患者,需要調整頭傾角才能將螺釘安全放置,較大的頭傾角和較大的內傾角不僅擴大手術切口,更增加軟組織張力,使螺釘安全置入的難度加大[12-13],而平行于矢狀面的椎弓根螺釘能避免來自雙側的軟組織張力,且適用于大多數椎弓根結構。現將寰椎平行于矢狀面置入椎弓根螺釘的優勢總結如下:① 大量的解剖學測量證實了寰椎平行于矢狀面置入椎弓根螺釘是可行的;② 平行于寰椎矢狀面的椎弓根螺釘進釘點靠近內側,減少了寰椎內弓暴露和椎動脈損傷的風險;③ 軟組織張力較小,螺釘方向不受軟組織張力影響,螺釘方向的準確性更好。
3.2 AI 算法在寰椎椎弓根螺釘置入中的安全性
智能化和精準化是現在醫學發展的重要方向和研究熱點,目前的骨科手術機器人均為術中實時采集三維 C 臂影像,術中人工規劃螺釘路徑,手術時間長,規劃準確性主觀因素大。骨科機器人中的系列全自動或半自動手術均基于 AI 自動規劃,如骨骼精準切割,內置物精準固定,腫瘤切除、穿刺等臨床手術[14-17],相對于傳統手術方式,基于 AI 技術的全自動或半自動規劃可提高手術效率,降低手術風險。然而,對于寰椎椎弓根置釘的 AI 自動規劃的報道極為少見,由于本研究團隊前期做了大量解剖學測量和臨床手術驗證,證實了平行于矢狀面的寰椎椎弓根螺釘置入的可行性。因此,本研究將 4 個重要空間關鍵點作為特征點,訓練 400 例不同解剖結構的寰椎模型,關鍵點定位準確率達到 98.62%;在 100 例寰椎模型中獲得驗證,100 例寰椎模型中平行于矢狀面的椎弓根螺釘均未突破皮質,安全率達到 100%,椎弓根螺釘中心線與椎弓根內邊緣距離與設置值的平均偏差 0.11 mm,獲得了較好的訓練效果,這不僅簡化了寰椎椎弓根螺釘內固定的術前模擬過程,也提高了置釘的安全性,為后期骨科機器人的寰椎椎弓根螺釘自動置入的手術模塊開發奠定了基礎。
3.3 大樣本量的 AI 訓練算法的應用前景
AI算法的穩定性和魯棒性好壞很大程度上受訓練樣本量影響,因此,寰椎模型庫應該涵蓋所有寰椎椎弓根形態,才能保證訓練模型的廣泛適用性[18]。本研究納入 400 例正常人體的寰椎模型,涵蓋了不同性別、不同年齡段、不同身高、不同體重以及不同體型的寰椎模型(為單中心研究),經計算,其空間關鍵點的平均定位誤差為 (0.47±0.16)mm,置釘平均偏差僅為 0.11 mm,完全滿足寰椎椎弓根置釘安全性需求;后期健康管理中心將持續擴大訓練樣本,進一步優化算法穩定性和魯棒性。
綜上所述,基于深度學習的AI算法,本研究小組建立了以寰椎前、后結節和雙側椎弓根內邊緣為空間關鍵點的平行于矢狀面的椎弓根通道優化模型,通過驗證發現其誤差較小,應用前景廣闊。
利益沖突:所有作者聲明不存在利益沖突。